
12
3.2.3 障碍物和道路边界的递归融合 13
3.3 扇区曲率法的改进 13
3.3.1 基于栅格的扇区结构特性 13
3.3.2 选择最佳的扇区 14
3.3.3 安全扇区的计算 15
3.3.4 带有道路边界约束的速度计算 16
3.3.5 改进的BCM算法实验 16
4 改进的Morphin算法 17
4.1 Morphin算法的基本思想 17
4.2 设计评估函数 18
4.3 启发滚动Morphin算法 18
4.3.1 启发式搜索 18
4.3.2 滚动规划 19
4.4 基于启发滚动Morphin算法的实验结果 19
结 论 21
致 谢 22
参 考 文 献 23
1 绪论
1.1 移动机器人的应用及研究意义
移动机器人的研究开始于20世纪60年代,随着科学技术水平的不断提高,移动机器人开始应用于工业、军事等各行各业之中。在军事上,一些比较危险的任务如果让移动机器人来完成,可以极大的减少人员的伤亡。在工业生产中,移动机器人可以替代搬运工人来完成搬运工作,从而提高生产效率,为企业创造更多利润。在交通运输方面,智能汽车可以将驾驶员从枯燥的驾驶工作中解脱出来,降低交通事故率,并缓解现在交通运输紧张的状况。在科学研究领域,移动机器人可以到达人类所无法到达的地方,探索宇宙的奥秘。
1.2 移动机器人自主导航与路径规划论文网
移动机器人自主导航指的是在没有人为干涉的条件下,依靠移动机器人自己,避开障碍物并到达目的地。自主导航包含三大要素:地图创建、定位和路径规划[1]。路径规划需要解决的问题有:如何从初始点到达目标点、如何避开障碍物、如何尽可能的优化路径。
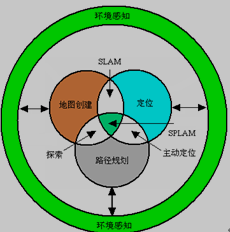
图1.1 地图创建、定位和路径规划与环境感知的的关系
根据环境信息的获取程度,路径规划可以划分为基于地图的全局路径规划和基于传感器的局部路径规划[2]。全局路径规划很容易给出一条最优路径,但是需要全局环境地图,并且信息量较大,在地图较大的情况下计算量很大。局部路径规划只需要知道当前环境信息,当前的环境信息是从各种传感器中获得的,环境信息随着移动机器人的移动而不断更新。
1.3 全局路径规划
常见的全局路径规划方法有图搜索法、基于RoadMap的方法、栅格法等。
1.3.1 图搜索法
图搜索法包括宽度优先搜索法、深度优先搜索法、等代价搜索法以及A算法等。
宽度优先搜索法先将起始点放入Open表中。开始的时候从Open表中取出一个节点,将该节点放入Closed表中,并判断是否是目标节点,如果是目标节点,则搜索结束;否则将该节点的所有不在Closed表中的子节点加入Open表之中。然后继续从Open表中取出一个节点,重复以上过程,如果Open表为空,则没有解,搜索结束。 Morphin算法面向非结构化道路环境的局部避障方法(2):http://www.751com.cn/jisuanji/lunwen_73759.html