
1.2 课题研究的理论基础
弹丸测速的研究步骤是本设计的理论基础,包括信号的收集、信号处理、运动特征参数拟合三个方面。
1.2.1 测速雷达反射信号的收集
本课题主要采用多普勒雷达对弹丸进行跟踪测试,其结构简图如图1.1(a)所示,工作原理图如图1.1(b)所示[5]:
多普勒雷达测速示意图
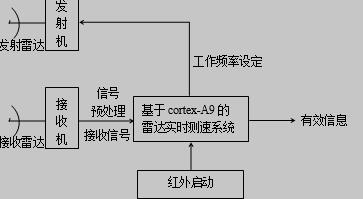
图1.1(b) 多普勒雷达系统的工作原理图
如果假定弹丸出膛时,在短时间内仅存在径向运动,且不考虑横风的影响。当发送连续波雷达用于检测弹丸的运动情况时,发射信号可表达为
(1.1)
式中, 为发射角频率; 为初相;A为振幅。
当电磁波接触到弹丸时,弹丸将反射一个回波信号 ,其表达式为
(1.2)
式中,k为衰减系数, 为回波滞后于发射信号的时间,且 ,c为电磁波传播速度,在自由空间中传播时,它等于光速; 为弹丸和雷达收发机之间的距离,由于弹丸的运动,有式:
(1.3)
式中, 为t=0时刻的距离; 为弹丸不考虑横风等因素影响的径向运动速度。
稍作推导,我们便可以得到一个关于收发频率差、发射波长和运动速度的关系式:
(1.4)
这就是多普勒频率与弹丸运动速度之间的公式[6]。由上述内容可知,我们所需要的收集的数据就是一组多普勒频率值,由于弹丸是一个运动的物体,且速度一直在改变,所以我们所收集到的多普勒频率 应该是一条随时间变化的曲线[7]。
1.2.2 测速雷达反射信号的信号分析
多普勒反射信号的处理方法主要分为3种,分别为定时测周法、定周测时法和频谱分析法。考虑到前两种测试方法是在时域上进行分析,但可以收集到的多普勒反射信号的时域有着诸多缺陷。由于衰减,反射信号的幅度较小,可能会淹没在一片白噪声中,信噪比很低。所以,本文将选用频谱分析法,借助FPGA和Context A9处理系统,完成对雷达测速信号的实时分析,得出相应的运动参数[8]。
利用多普勒效应对雷达反射信号进行频谱分析的方法,可以将反射信号的全部信息都记录下来并加以分析,整个过程能够实现完整的数字化处理,精度可以满足数据处理的要求,在低信噪比和抗干扰方面具有很大的优势,灵活性也较强,弹丸的全程速度规律都将被推演并记录。这种方法对于测量连续目标来说,优势十分明显[9]。
傅立叶变换可以将时域信号转换为频谱信号,在时域与频域的转换过程中,存在4种不同的傅里叶变换形式,如表1.1所示[10]。
表1.1 各类傅立叶变换
变换名称 时域 频域
连续Fourier变换 非周期、连续 非周期、连续
连续Fourier级数 周期、连续 非周期、离散
离散时间Fourier变换 非周期、离散 周期、连续
离散Fourier变换 有限长、离散 有限长、离散
由于计算机无法处理模拟信号,所以时域或频域谱连续的情况都难以进行计算机处理。根据上述情况,我们选择离散傅里叶变换(DFT:Discrete Fourier Transform)对速度信号进行处理,对N点的序列x(n),DFT的变换公式为[11]: 基于Cortex-A9的新一代155自行炮测速雷达实时信号处理系统的设计(3):http://www.751com.cn/tongxin/lunwen_41820.html