
PID控制系统可以分为开、闭环控制系统以及阶跃响应这三类[8]。
开环控制系统是指控制器的输入与被控量(控制器输出量)无关[8]。在这种控制系统中,不存在任何形式闭环回路。就像冬天都会用的”热得快“只有一根U型电热管,插电后你必须时刻注意着,否则,水烧开了甚至烧干了,它都不会自动断电,这就是一个典型的开环控制系统。文献综述
闭环控制系统是指控制器的输入与被控量相关,输出量会反过来影响输入量[8]。闭环控制系统有正反馈(符号相同)和负反馈(符号相反)两种。实际应用中一般都采用负反馈,所以也可称为负反馈控制系统。比如电热水壶,插电后,水烧开了,它自动会断电,不用你一直呆在旁边时刻注意着,这就是闭环控制系统。
阶跃响应是指系统在输入时加入一个阶跃信号,系统所作出的响应[8]。稳态误差是指实际输出值与理论输出值在系统进入稳态时的差值[8]。
2.2 PID控制器的原理控制特点
PID控制器由比例 、积分、微分三部分构成,如下图所示。
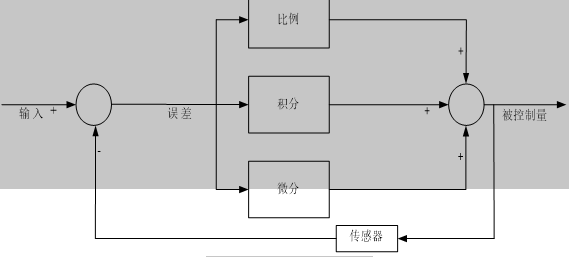
图2-1 PID控制原理图
输入函 与输出函数 的函数关系式为[10]:
(2-1)
传递函数为:
(2-2)
其中:比例系数 ;积分时间常数 ;微分时间常数 [14]。
比例控制是指控制器的输出与输入误差信号成比例关系[14]。
积分控制是指控制器的输出与输入误差信号的积分成比例关系[14]。有差系统是指当系统进入稳态时仍然存在稳态误差。为了消除存在的稳态误差,我们引入了积分项。即对误差进行时间积分,积分项的值随时间的变长而变大。再小再小的误差都能因积分项的存在而变得很大很大,它使输出增大,稳态误差越来越小,一直到等于零。比例+积分控制器的出现可以使系统在稳定后不存在稳态误差。
PID控制器的参数整定[9]是根据被控对象的特征来确定PID控微分控制是指控制器的输出与输入时误差信号的微分成比例关系[14]。由于组件之间存在惯性和滞后现象,会起到拖慢误差的作用,从而误差产生了滞后现象,自动控制系统为了克服误差可能会出现振荡甚至失稳现象。为了提早误差的变化时间,就需要引入新的环节来预测误差变化的趋势,微分项就起到了这一作用。比例+微分的控制器就能够实现这一功能从而避免了超调现象。
制器的 (比例系数)、 (积分时间)和 (微分时间)。参数整定[4]的方法多种多样,下面具体介绍其中的2类:理论计算法和工程整定法。理论计算整定法主要是以数学模型为基础,通过理论计算来确定参数。但是并不能直接用于工程控制中,必须在实际操作中不断的改善。工程整定方法主要靠经验,直接在运行过程中操作。
一般工程实际中用到的都是工程整定方法中的临界比例法[15]。其具体的整定步骤如下:
(1)选择采样周期;
(2)加入比例控制环节,发生临界振荡时,记录下比例放大系数和震荡周期;
(3)通过公式计算参数。
大比例增益P对应着高调节灵敏度,但因为惯性的存在,调节到最佳灵敏度时,不能够立即停止,导致超调现象,如此循环下去形成振荡现象。引入积分环节I,使放大后的差值信号在积分时间内慢慢变化,降低了变化速度,防止出现振荡。如果被控物理量很难在反馈信号快速变化时迅速恢复就是因为积分时间I过长。因此,I的取值范围与时间常数有关,成正比关系。 基于灰色理论的PID控制系统研究(2):http://www.751com.cn/tongxin/lunwen_73004.html