
实验中带动模拟目标和模拟导弹的圆盘转动的机器为一台完整的步进电机系统,型号为JMDMRS-485/232。它由串口(控制器、通信线)、步进电机驱动器、220V转换成24V的电源组、两步进电机这五个部分组成。步进电机是一种转动角度只和脉冲频率、脉冲数有关的电机,其转动角度不受负载影响,只由脉冲控制,步进电机在没有过载的情况下,能根据接收到的脉冲调节到相应的位置,调节的速度和角度由脉冲的频率和数量决定,而且关系是线性的再加上步进电机不存在累计误差,使得步进电机的带动在速度和角度方便具有很高的精确度。也相对容易控制。此系统中步进电机每收到一个脉冲,转动1.8°。最高细分等级能达到256分,也就是说,该步进电机可以达到最细0.0070º旋转的精度。
整体步进电机和黑体辐射源放置在一个移动支架上,移动支架下方接着一个三角支架,在实验开始之前,可以通过调节支架来控制试验台的高度、水平度等等将实验系统调节到一个需要的初始状态。而下方一个稳定的三角支架,也能给实验提供一个稳定的实验环境。即可以确保实验在相对精确的环境下进行
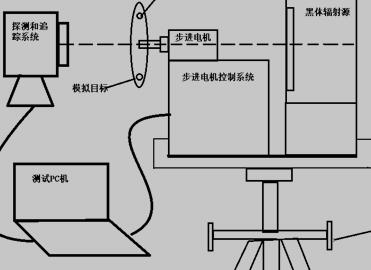
图1.1.1小目标方位搜索模拟系统的结构图
2.1.1 步进电机系统介绍
在进二十年科技的发展中,在电力电子学科、微电子技术、微处理器的发展为前提下,步进电机及其系统的发展已经取得了巨大的飞跃,在众多科学家的专研下,步进电机及其系统日趋完善,已经变成了一项比较成熟的可靠的技术[14]。
本次设计中就使用到了步进电机以及其驱动设备,它能更加精确的确定模拟导弹和模拟目标运动的角度、距离、方向等参数,在本系统中起着很重大的作用。
步进电机是一种将脉冲信号转化为固定角度和长度的设备[15]。运行中,它将脉冲信号转化为所需要的旋转角度和运动直线长度,步进电机的转速是由脉冲信号自身的频率决定的,而步进电机运行的时间由脉冲的个数决定,即个数决定了其最终停止的位置。由于步进电机能够做到无累积误差,所以利用步进电机测得的角度和长度都是十分精确的。
步进电机的工作原理如图2.1.1(a)所示,在其工作时,假设电机通电顺序为A通向A',接着B通向B',然后A'通向A,最后B'通向B,此时,外圈的定子是不做运动的,而内圈的转子,即一个带有磁性的物质,会在通电磁线圈产生的磁场中做旋转。假设如上文所述,转子在磁场影响下做顺时针旋转,则若通电方向为为A通向A',最后B'通向B,然后A'通向A, B通向B'时,为逆时针旋转,而通电方向根据脉冲信号的情况而发生变化,所以脉冲的频率越高,转子的转动速度也越快,步进电机的转动也随之变快。因此我们不难得出结论,转子的转动力矩与线圈上通过的电流大小、线圈的数量、电机自身的体积重量成正比。
步进电机的技术指标主要包括以下几个:
(1)拍数:在一个完整的运行周期内,电机接到的脉冲数。用字母n表示拍数。
(2)相数:即定子上线圈对个数,用字母m表示相数。
(3)步距角:电机转子在一个脉冲信号下转过的角位移,常用θ表示。θ=360度/转子齿数×运行拍数。一般情况下两相电机四拍运行时步距角为1.8度(整步),八拍运行时步距角为0.9度(半步)。 近距离红外目标方位探测研究(3):http://www.751com.cn/wuli/lunwen_20502.html