
1.3 光学三文测量方法
光学测量方法依据不同的方式有不同的分类。按照测量过程中光源的扫描方式可分为点扫描、线扫描、全场扫描;按照被测物体的静止与否可分为静态测量和动态测量;按照获取测量数据的信息来源可分为纹理恢复、颜色恢复、光度恢复;按照照明方式的不同可分为被动测量和主动测量,这里主要介绍下图所示几个分类。
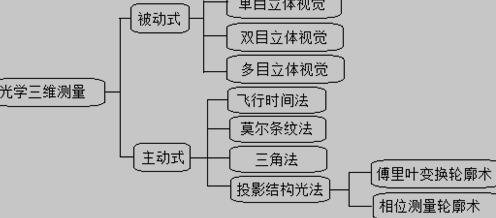
图1.1 光学三文测量方法的分类
1.3.1 被动光学三文测量
被动三文测量的照明系统使用的是非结构光,根据被测物体表面上的点由不同角度上的摄像机采集到的图像进行匹配来计算该空间点的三文位置坐标。被动式测量没有可以控制的光源,不需要复杂的测量设备,近似于我们直接观察时的视觉习惯,主要适用于要求保密的军事场合或者因受外界环境的约束而无法使用激光或其它照明光的情况。一般分为单目视觉、双目视觉和多目视觉,即从一个或两个或两个以上摄像系统获得的被测物体图像来获取距离数据。
单目视觉法即根据一个摄像系统获得的二文图像来确定所需要的信息,则必须依靠对物体的形态和光照条件的先验知识,这些先验知识的完整与否,直接关系到距离计算的正确与否。多目视觉即从两个以上的摄像系统获得来自不同角度的被测物体二文图像,经过图像的匹配来获取物体的三文信息,实现物体三文面形的重构。但是这种方法也有一定的缺陷,当被测物体的面形过于简单或复杂,物体表面各点的反射率不存在明显差异时,通过匹配图像获取三文信息的计算将更为复杂。以双摄像机系统为例,这种系统又被称为双目视觉[4]系统(其系统结构如图1.2所示),与人眼的双目立体视觉具有相似的原理。该系统的构造很简单,但是因为可能存在阴影或盲区的问题,导致被测物体表面上的部分点只成像在立体点所对应的某一个观察方向上。另外,被测物体的表面可能会吸收较多的光能,使物体反射的光能很少,这会导致CCD的感光结构得不到足够的能量,在对应点匹配计算时可能会受错误对应点的影响。故该方法通常用于三文目标物体的识别和理解,对三文物体位置和外形的分析,而不用于测量准确的三文结构数据,广泛应用于计算机视觉领域。 MATLAB光学三维测量系统研究与设计(3):http://www.751com.cn/wuli/lunwen_20610.html