
关键词:邮件分拣关节型机器人,谐波减速器,步进电动机,机械手
Abstract
On the basis of existing robot is presented a four degrees of freedom robot joint in this paper. Robot driven by stepping motor and were introduced in detail of the design process and the mode of each joint movement. Through the checking calculation of key parts optimize the overall structure of the robot, make its can satisfy the need of work. At the same time, analyses its advantages and disadvantages and application scope. Then according to the content and requirement to design the robots integral structure. The main process including the selection of stepper motor, the design of harmonic gear reducer, the size of the robots’ identification and optimization, transmission mode and mechanical structure design of each joint.
Key word:Mail sorting joint robot;Harmonic reducer; stepper motor; manipulator
目录
前言
1 绪论
1.1 邮件分拣机器人的介绍1
1.2 邮件分拣机器人的分类 .2
1.2.1 关节型机器人的分类 .7
1.3 邮件分拣机器人研究的目的和意义 8
1.3.1 邮件分拣机器人研究的目的 8
1.3.2邮件分拣机器人研究的意义 8
1.4 邮件分拣机器人的发展 8
2 邮件分拣机器人的设计
2.1 设计内容10
2.1.1 机座部分11
2.1.2 谐波减速器12
2.1.3 电动机的选择13
2.1.4 肩关节,肘关节传动方式14
2.1.5 机械手结构14
3 结构设计和参数计算
3.1 基本结构参数
3.1.1 电动机的选择15
3.1.2 基本结构尺寸15
3.2 传动方案的选择17
3.2.1气压驱动直角坐标型机器人18
3.2.2电动机驱动关节型机器人18
3.2.3液压驱动机器人19
3.2.4方案比较与确定20
3.3 机座回转结构的设计 21
3.3.1电机的选择22
3.3.2谐波减速器的设计22
3.3.3轴的设计22
3.3.4键的选择23
3.3.5轴承的选择及校核23
3.4 肩关节传动方式设计23
3.4.1.电动机的选择24
3.4.2轴的设计与校核25
3.4.3键的选择25
3.5 肘关节传动方式设计26
3.5.1电动机的选择27
3.5.2轴的设计与校核28
3.5.3 键的选择28
3.5.4 轴承的选择29
3.6 机械手的结构设计30
3.6.1电动机的选择30
3.6.2齿轮齿条传动设计31
4 关节型机器人的操作与文修
4.1可逆式破碎机的操作32
4.1.1 启动前的准备工作32
4.1.2 启动和操作的注意事项32
4.1.3 停机注意事项33
4.2 可逆式破碎机的文护保养33
4.2.1 润滑33
4.2.2 巡回检查和日常文护33
4.3 安全操作技术33
总结34
致谢35
参考文献36
1绪论
1.1 邮件分拣机器人的介绍
图1半自动化的邮件分拣
随着电子商务,网上购物的流行,物流中心每天都有数不清的邮件需要进行分拣,输送。这是一项工作量非常庞大的任务,如果只是依靠人力的话,不仅需要花费大量的时间与金钱,而且还有可能出现差错,给人们带来一定的损失,所以这就使得分拣机器人的出现成为必然,分拣机器人就是将邮件按照各种信息进行分类,比如邮件品种、货主、储位或发送地点等.
分类装置是邮件分拣机械系统的一部分,主要用于邮件的分拣功能,是邮件分拣机械系统的重要组成部分。
工作原理:
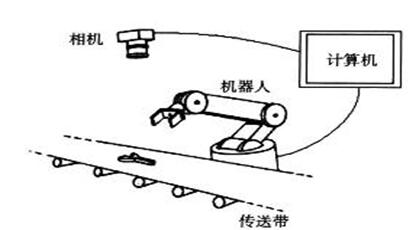
图2 工作原理示意图
我设计的是一个拥有四个自由度的关节型机器人,机器人具体工作过程为:通过机器人机座旋转以及各关节处的俯仰,机械手将邮件抓起,然后将邮件由固定位 邮件分拣机器人机械系统设计+CAD图纸(2):http://www.751com.cn/jixie/lunwen_11164.html