
执行机构包括手部、手腕、手臂和立柱等部件,根据需要还可增设行走机构。腕部是连接手部和手臂的部件,并可用来调整被抓取物件的方位即姿势。手臂是支承被抓物件、手部、手腕的重要部件。手臂的作用是带动手指去抓取物件,并按预定要求将其搬运到指定的位置。卸垛机器人的手臂通常由驱动手臂运动的部件如油缸、气缸、齿轮齿条机构、连杆机构、螺旋机构和凸轮机构等与驱动源如液压、气压或电机等相配合,以实现手臂的各种运动。
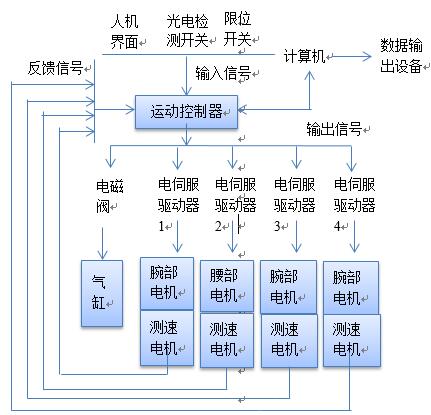
图2.3-1 码跺机器人机械结构总成图
立柱是支承手臂的部件,立柱也可以是手臂的一部分,手臂的回转运动和升降或俯仰运动均与立柱有密切的联系。卸垛机器人的立柱因工作需要,有时也可作横向移动,即称为可移式立柱。当卸垛机器人本体需要完成较远距离的操作,或扩大使用范围时,可在机座上安滚轮式行走机构可分装滚轮、轨道等行走机构,以实现卸垛机器人的整机运动。滚轮式布为有轨的和无轨的两种。驱动滚轮运动则应另外增设机械传动装置。机座是砖窑卸垛机器人本体的基础部分,机器人执行机构的各部件和驱动系统均安装于机座上,故起支撑和连接的作用。
2.4 调研小结
以上引用的应用案例是由四个自由度独立控制的袋式抓取码垛机器人单元。码垛机器人主要由执行机构、驱动系统、控制系统以及位置检测装置等所组成。位置检测装置中放置的各种传感器解决了码垛机器人在抓取货物时定位和定向的问题。执行机构、驱动系统和控制系统保证了码垛机器人工作的顺利进行,按预定要求将其搬运到指定的位置。其中控制系统主要目的是进行机器人四个运动轴的位置控制和系统运行中的故障处理。它有一套较为完善的闭环控制系统,以及时对码垛工作中出现的各种突发状况自行调节和制定合适的工作方案。本章中对相关的码垛机器人进行了调研学习,通过结合本课题的设计任务要求对选取的应用案例进行分析和对比学习收获颇多。 自动立体仓储系统码垛机器人单元设计+CAD图纸(5):http://www.751com.cn/jixie/lunwen_13354.html