
1.2 选题背景及意义
机器人技术是综合了机械技术、控制技术、计算机技术、传感器技术、仿生学等多种技术的一门综合性的技术,在各个领域中都有十分广泛的应用。一个国家的机器人技术的发展水平是这个国家工业发展水平的一个重要的标志。机器人技术并不是简单地代替人工,而是将人工的优势和机械的优势综合起来形成综合性的机电一体装置,既要有类似于人类的感应与判断的能力,又要有机器的工作时长、作业精度高、抗干扰能力强、能适应各种恶劣环境等优势[2]。工业生产中的机械手被称为工业机械手,在机械加工、物料搬运、涂装焊接、汽车制造、轻工业等各个领域中有越来越广泛的应用。根据所用领域的不同,机械手的分类和构造也不同。早期的机械手基本上是为某一专用工具设计的,专用性比较强,但随着机械手技术的发展,人类制造了适用范围更加广泛的通用机械手,能够从事更多领域的工作。通用机械手的功能更强大,适用范围广的优点,使其在中小规模的生产中应用的范围更加广泛[3]。现代机械手是于示教再现和主从控制,能适应产品变更、具有多自由度动作功能的柔性设备[4][5]。现在使用机械手代替人工已成为很多行业的趋势。在将来很多生产工作场合的工作都会被机器人所替代,机器人会对未来社会的发展起越来越重要的作用[6]。
本毕业设计所设计的机械手是为某果品企业所设计的用于苹果装箱,将繁琐的苹果装箱工作由机械手来完成以提高劳动生产率,减轻工人劳动。通过本次设计,使学生熟悉机械产品设计生产的一般性过程,将本科阶段所学的理论知识运用到实际的设计过程中,着重培养设计、计算、分析和解决问题的能力,进而总结、归纳和获得合理结论,进行较为系统的工程训练,初步锻炼科研能力,提高论文撰写和技术表述能力。为实际工作奠定基础,达到人才培养的目的与要求。
1.3 国内研究现状及发展趋势
1.3.1 国内发展现状
1.3.2 机械手发展趋势
1.4 机械手发展的意义
1)可以提高生产过程中的自动化程度。通过使用机械手,可以提高生产效率,降低劳动成本。
2)可以改善生产条件,保障人工安全。通过将危险复杂环境中的工作交给工业机器人,可以改善工人的劳动条件。
3)可以节约人工成本,稳定生产。简单的重复性工作如果交给机械手去做,将大大降低生产的人工成本,且机械手的生产更加精确稳定[11]。
1.5 机械手简介
1.5.1 机械手结构组成
一般来说,机械手由四部分组成,分别是驱动系统,执行机构、控制系统和位置检测装置。其中各个系统部分之间的关系如下图所示。
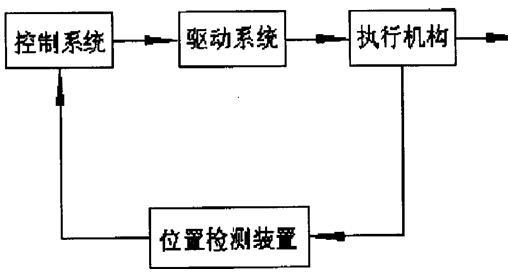
图1.1 机械手结构组成
1)执行机构
机械手的执行机构包括手爪、手腕、手臂、立柱等部件
手爪:
直接与被抓取物件接触的部分,主要起抓取和放置物件的作用。由直接接触被抓取物的手指和其他传力结构组成。
手腕:
手腕是连接手爪和手臂的部分,主要作用是调整夹取物件的位姿
手臂:
机械手的手臂是支承被抓取的物件、手爪和手腕的重要部件。手臂的作用是带动手爪去抓取物件,并将其搬运到预定的位置。
立柱:
立柱是机械手支承手臂的部件,手臂的回转运动和升降运动均与之有密切的联系。因工作需要,机械手的立柱也可作横向移动,被称为可移式立柱。 三自由度苹果装箱机械手设计(2):http://www.751com.cn/jixie/lunwen_46255.html