
目前,在国际上机械手主要有日系和欧系公司。日系中的机械手主要包括安川、oTC、松下、FANLUC、不二越、川崎等公司的产品。欧系机械手公司中主要包括德国的KUKA、CLOOS、瑞典的ABB、意大利的C0毗U及奥地利的工GM公司。
然而我国机器手开始使用于20世纪70年代初期,历时30多年发展,机械手大概经历了3个阶段:70年代萌芽期,80年代的开发期和90年代的应用化期。在我国,国外机械手企业占据着我国大部分市场份额。在国际机械手强国面前,国内的机械手企业面临着非常大的竞争压力。我国政府对机械手这个行业非常重视,并且提供了大量的科研资金,这将会给机械手产业的发展提供新的动力。
第二章 搬运机械手总体方案设计
2.1课题认识与总体方案设计
本论文主要研究箱式货品搬运机械手。课题研究的内容是在自动生产过程中机械手爪对产品的搬运。这一环节的工作内容相对简单,重复性强,往往工作强度大。产品从一条传输线转移到另一条传输线,有产品的抓取、放下和移动动作。搬运箱式货物机器手有特定的要求:箱式货品质量m:50kg ;机器手开口尺寸: ;抓取、放松动作时间:单独可调, 。机器手的任务是完成对箱式物品的抓放和移动。一般驱动机械手的驱动器有电机驱动、液压驱动和气动等。而驱动装置由控制器所控制,如PLC控制、单片机和工控机。传感器对机械手爪的开放松、抓取的速度和手爪上下移动的位移进行检测,并将相关信息反馈传递到控制器,转换成控制量来控制手爪。拟定机械手系统总体框图如图2-1所示:
图 2-1 机械手系统总体框图
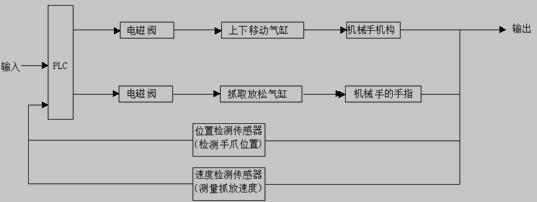
本课题设计的重点是手爪的上下移动位置和手爪抓取放松的速度进行检测,即机械手爪能够精确地按照指令抓取牛皮纸箱是至关重要的一步。给定系统操作信号,PLC接收信号并控制气缸的运动,电磁节流阀通过调节通气流量的大小控制机械手的上下移动及手爪夹紧放松动作,过程中传感器检测机械手爪上下移动的位移和手爪抓取松开的速度,并反馈给PLC。整个系统包括机械结构、驱动装置、控制系统和传感检测系统,以下是对各系统的简单描述,即总体方案论述。
2.1.1机械手结构设计
本课题机械手执行机构的任务是对箱式货品的抓放和移动。手爪的结构有两种,分别是夹持式和吸附式。考虑到箱子形状的方正性和纸质性,本课题机械手我选择夹持式。设计的机械手爪由一对钢板手爪组成,这样更有利于抓取箱子且防止滑落 箱式货品搬运机械手系统设计+CAD图纸(3):http://www.751com.cn/jixie/lunwen_47667.html