
1.4机械臂研究的意义
机械臂属于工业机器人,它能够实现搬运物体等工作,机械臂通常由手臂、手腕和手爪组成[1]。它的普及大大提高了生产率而且减轻了工作强度,更为重要的是产品的质量得到了显著的提高。在一些危险系数比较大或者是劳动强度比较大的场合,它的出现极大避免了事故发生率。
由于机械臂的工作空间比较小使得机械臂功能的拓展非常困难,在此基础上,将机械臂安装在移动机器人上的技术应运而生,这项技术的工作空间不受限制、灵活性好。因此,这项技术的研究显得非常有意义。
第二章 总体方案设计
2.1控制方案设计
根据智能车载机器人运动特点分析可知,控制系统需要同时监控多个电机,可根据调试需要加减电机控制器终端节点,本文基于分级控制的思想设计智能车载机器人控制系统。其中控制框图如2-1所示,上级PC负责调试管理、命令发布等工作;中级总控制器负载协调各个子控制器工作;下级则由各子控制器负责实现各电机的控制。本文主要完成智能车载机器人的腰关节和臂关节的设计如下图虚线框内,其它内容由小组其它成员完成。
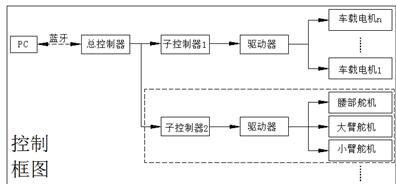
图2-1 控制框图
为了提高机械手抓取物体的精度,我们通过陀螺仪对机械臂旋转的角度进行实时在线监控形成可随时调节的闭环系统,具体控制方案的反馈调节如图2-2所示,通过陀螺仪角度的检测反馈给子控制器2,然后对角度的偏差进行比较计算,再通过PC机对机械臂的位置角度进行调节以达到预期值 solidworks车载机器人一体化平台机械手腰臂关节设计+CAD图纸(3):http://www.751com.cn/jixie/lunwen_47979.html