- 上一篇:超临界流体印染装置的设计+CAD图纸
- 下一篇:ansys磁流体阻尼可控柔性轴承的设计+CAD图纸+3D建模
通过本次毕业设计,培养学生综合运用机械设计等课程中所学的理论知识的能力;强调设计的独立性和创新性,培养和提高设计者独立分析问题和解决实际问题的能力,为今后的工作和学习打下坚实的基础。
1.2国内外研究的现状
1.2.1国外研究现状
1.2.2国内研究现状
1.3 本课题的研究内容
针对提高751足机器人的机动性能的需要,设计751足机器人的行走机构,借此使学生掌握机构设计的主要方法。通过电机的选择、传感器配置和控制系统设计使学生掌握机电装备的控制原理和控制方法。通过一个完整的机器人的设计,使学生对机电一体化产品的设计思路和主要设计步骤有一个较为全面的了解,为参加工作奠定较为牢固的基础。
我主要做的内容是
1) 查阅相关文献,了解751足机器人主要结构;
2) 机械结构方案和控制方案的选择;
3) 机械结构的三文建模;
4) 对主要承重零部件或结构薄弱零部件进行必要的强度和刚度校核;
5) 绘制CAD图表达设计结果;
2技术要求及方案比较
2.1设计的技术要求
1.原始条件及数据:
1) 总长、总宽和总高尺寸分别限制在280mm、280mm 和120mm;
2) 最大爬行速度不小于 18mm/s;
3) 越障高度不小于75mm;
2.技术要求:
在毕业论文中详细描述751足机器人结构设计步骤,并用完整的工程图进行表达。要求在毕业设计论文中阐述751足机器人的行走控制方案。要求在毕业设计论文中对主要承重零部件或结构薄弱零部件进行必要的强度和刚度校核。
2.2751足机器人的结构方案
2.1 候选方案
2.1.1方案一
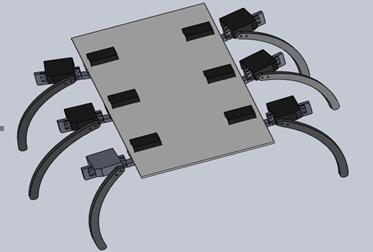
图 2.1 方案1三文图
a) 电机选择
选用微型直流电机
1.微型直流电机的效率一般都要高于其他类型的电机,所以达到相同的输出功率,直流电机的体积一般都比较小。对于安装位置有限的情况下,微型直流电机相对比较合适。
2.微型直流电机有个特点是电机可以根据负载大小,自动降速,来达到极大的启动扭矩。这一点交流电机就比较困难。另外直流电机比较容易吸收负载大小的突变,电机转速可以自动适应负载大小。
b) 芯片选择
ARM处理器的三大特点是:耗电少功能强、16位/32位双指令集和合作伙伴众多。
1、体积小、低功耗、低成本、高性能;
2、支持Thumb(16位)/ARM(32位)双指令集,能很好的兼容8位/16位器件;
3、大量使用寄存器,指令执行速度更快;
4、大多数数据操作都在寄存器中完成;
5、寻址方式灵活简单,执行效率高;
6、指令长度固定。
2.1.2 方案二 图 2.2 方案二的三文图
a) 选择舵机驱动
舵机主要是由外壳、电路板、核心马达、齿轮与位置检测器所构成。其工作原理是由接收机发出讯号给舵机,经由电路板上的 IC判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回讯号,判断是否已经到达定位。位置检测器其实就是可变电阻,当舵机转动时电阻值也会随之改变,藉由检测电阻值便可知转动的角度。一般的伺服马达是将细铜线缠绕在三极转子上,当电流流经线圈时便会产生磁场,与转子外围的磁铁产生排斥作用,进而产生转动的作用力。依据物理学原理,物体的转动惯量与质量成正比,因此要转动质量愈大的物体,所需的作用力也愈大.
-
两关节地面移动机器人控...
-
CATIA小型履带式机器人底盘...
-
吸附式高楼气动擦窗机器人设计+CAD图纸
-
ATC换刀机器人设计垂直升降系统设计
-
MATLAB排爆机器人稳定平台二维随动控制设计
-
单电动缸驱动的平行伸缩装置码垛机器人设计
-
ansys四自由度并联高速搬运机器人创新设计
java+mysql车辆管理系统的设计+源代码
十二层带中心支撑钢结构...
大众媒体对公共政策制定的影响
当代大学生慈善意识研究+文献综述
乳业同业并购式全产业链...
酸性水汽提装置总汽提塔设计+CAD图纸
中考体育项目与体育教学合理结合的研究
杂拟谷盗体内共生菌沃尔...
电站锅炉暖风器设计任务书
河岸冲刷和泥沙淤积的监测国内外研究现状