
2. 在液位控制系统中,调节阀是否与所控制的液体发生化学反应等,直接的影响到控制结果。
3. 控制方案的选取,一个好的方案会让系统更加完美,所以方案的选取也非常重要。
4. 调节器参数的整定,一个系统有了好的方案,但是如果参数整定错误那也是功亏一篑。
1.4 本论文的结构安排
论文共由7个章节组成,主要内容及结构安排如下:
第1章,绪论,介绍课题的背景来源、研究意义和主要研究内容,并对相关技术现状做简要分析;
第2章,系统方案设计,对整个系统的设计方案做总体的介绍以及系统控制单元方案的设计及选择。
第3章,相关技术介绍,介绍了设计中所使用的相关技术,系统硬件原理设,写在毕设中的控制方法等。
第4章,系统软件程序的设计,在Rockwell PLC开发环境中对系统进行功能调试,包括系统硬件调试和系统软件调试等。
第5章,总结,总结设计,得出结论,总结设计收货和体会。
2 液位控制系统概述
2.1 液位控制系统简介
液位控制系统主要由执行器、控制器和检测机构组成, 传统的调节器主要由模拟电路构成, 结构比较复杂, 使用寿命短, 经常调节会使使用精度降低. 而使用可编程控制器( PLC) , 要求功能变化灵活, 编程简单、故障少、噪音低、文修保养方便、节能省工、抗干扰能力强.
组态王是一套用于快速构造和生成计算机监控系统的组态软件, 能够在Window s 平台上运行. 通过对现场数据的采集处理, 以动画显示、报警处理、流程控制、实时曲线、历史曲线和报表输出等多种方式, 向用户提供检验液位PLC 控制系统的动态运行情况. 当液面达到设定值时, 通过组态软件控制PLC 自动进行PID 调节, 使液面达到动态平衡, 并且在组态界面上可实时观察到液位的动态变化.
2.2 PID控制系统
在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID 控制,又称PID 调节。PID 控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,
系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID 控制技术最为方便。即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用PID 控制技术。其控制原理如下图所示:
控制原理图
2.3 串级控制系统
2.3.1 串级控制系统的概述
图3-2是串级控制系统的方框图。该系统有主、副两个控制回路,主、副调节器相串联工作,其中主调节器有自己独立的给定值R,它的输出m1作为副调节器的给定值,副调节器的输出m2控制执行器,以改变主参数C1。
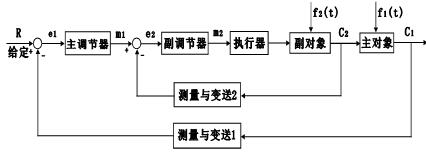
图3-6串级控制系统方框图
2.3.2 串级控制系统的特点
1) 改善了过程的动态特性;
2) 能及时克服进入副回路的各种二次扰动,提高了系统抗扰动能力;
3) 提高了系统的鲁棒性;
4) 具有一定的自适应能力。
2.3.3 主、副调节器控制规律的选择
在串级控制系统中,主、副调节器所起的作用是不同的。主调节器起定值控制作用,它的控制任务是使主参数等于给定值(无余差),故一般宜采用PI或PID调节器。由于副回路是一个随动系统,它的输出要求能快速、准确地复现主调节器输出信号的变化规律,对副参数的动态性能和余差无特殊的要求,因而副调节器可采用P或PI调节器。 PLC液位控制系统设计+文献综述(4):http://www.751com.cn/zidonghua/lunwen_15182.html