
控制系统的结构遵循了分布式设计,逻辑上可以分为三个系统:以调制解调板为主控站的串行总线多机通讯系统、分布式级联的区间编码系统以及信号灯道岔DCC信号解码系统。
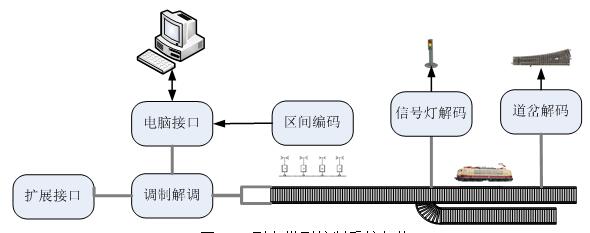
图2.1 列车模型控制系统架构
2.2 DCC信号标准
按照电流信号的不同可以分为两种,DC(Direct current)与DCC(Digital command control)。DC控制时会在轨道上加载直流电,然后通过控制器控制轨道上的电压,从而达到控制电机转速高低或者电流极性的改变,实现列车速度的控制。由于DC是直接控制轨道上的电压高低,所以如果同时跑几辆车而且又没有做区段,不同列车将不能独立控制[9]。DCC是采用在轨道上加载数字电流信号,列车解码这个数字信号,从而获得受控信息。由于接收到的是数字信号,可以对不同列车进行地址编制,避免了不同列车不能独立控制的缺点。
2.2.1 DCC编码位
在一个“1”位,一个位的第一个和最后部分应具有相同的持续时间,以及理论上的持续时间是58微秒,给予一位总共116微秒的持续时间。数字指挥仪组件将发送“1”位与第一个和最后各部分之间介于55和61微秒的持续时间。一种数字解码器必须接受的位是指其第一个和最后一个部件都具有介于52和64微秒的持续时间,并且“1”的值是有效位。
在一个“0”位,每个转变的第一和最后部分的持续时间应理论上大于或等于100微秒。与“1”位保持总的信号的直流为零,则“0”位的第一和最后部分通常彼此相等。数字指挥仪组件将发送“0”位与具有95和9900微秒之间的持续时间的位到与“0”位不超过12000微秒的总位周期的每个部分。一个数字解码器必须接受一种位,其第一个或最后一个部分有10000微秒之间90和持续时间与“0”值的有效位。图2提供了位使用该技术的编码的一个例子。
图2.2 编码位
图2.3 数字解码器必须接受一个正面和负面的成分相差多达6微秒的位。
2.2.2 信号电气标准
DCC信号被应用的到任何数码控制系统的轨道中。在电站输出测量时,,从空载到通过电源允许的最大连续负载下测出其应具有以下特点和条件。发生在-4伏和4伏之间的区域内每微秒2.5伏的转换速度会更快。此信号可包含非单调失真在该过零跳变,但前提是这种振幅变形应具有不大于正负2伏的特性。
数字解码器的设计应能正确解码信号的转换,其斜率为2.0伏每微秒或两端的电压范围为-4伏到4伏得更快。 A数字解码器应能正确解码至少95%的妥善解决基线包,如S-9.2定义的,在噪音的存在(和/或其它类型的信号)超过100 kHz,总峰 - 峰值小于四分之一的NMRA数字信号的峰 - 峰幅度的。
该NMRA数字信号的精确形状的设计应尽量减少电磁辐射,例如,使用此标准的大布局操作能满足适用的美国联邦通信委员会电磁干扰要求。
动力传动与电压限制发射功率通过轨道提供操作机车及配件,将由所有数字命令电台和数字解码器支持的功率基准线的方法,是由数字Decoder7内的双极NMRA数字信号的全波整流。为了保持电源数字解码器,比特的传输间隙只在指定的时间内允许。 NMRA数字信号的RMS值,在轨道计算,不得超过2 volts8标准S9的适用scale9规定的电压超过。在任何情况下,命令控制信号的峰值幅度超过+ / - 22伏。需要提供电源给解码器的NMRA数字信号的最小峰值应在轨道测量+ / -7伏。数字解码器意为“ N”和小尺度的设计应能承受至少24伏特的直流电压于track.Digital解码器测量用于鳞比“N”的设计应能承受的直流电压至少大27伏于轨道测量。 列车模型控制系统软硬件设计(3):http://www.751com.cn/zidonghua/lunwen_17158.html