
滤波技术是信号分析和信号处理技术的重要分支,无论是信号的获取、传输,还是信号的处理和交换都和滤波技术密切相关,它对信号的安全可靠和有效灵活地传输都是极为重要的[3]。现今的各种电子器件和各种控制系统中,滤波技术的应用十分广泛。在所有的电子系统中,使用最多,技术最复杂要数滤波器了,滤波器的优劣直接决定了产品的优劣,它将直接给系统的精准度及用户的体验带来极大的影响[4]。
数字滤波技术于20世纪40年代末开始提出,于20世纪60年代中期形成了完整的理论体系[5]。滤波器的功能是滤除信号中不需要的分量,保留有用的分量,其基本含义就是对波的一种过滤。通过信号的滤波,可以实现去除噪声干扰、均衡信道、平滑图像、信号分离和预测等[6]。由此可见,设计伺服系统的滤波算法具有较重要的理论意义和实际应用价值。
1.2 当前现状
1.3 研究内容
本课题主要研究用于稳定伺服系统的滤波技术,通过分析与对比常用滤波器对伺服系统性能指标影响,并通过仿真验证研究的有效性。本文主要内容及安排如下:
第一章 介绍了伺服系统的滤波算法研究的背景以及国内外发展的现状。
第二章 对伺服系统进行了简介,基于MATLAB搭建伺服系统平台并分析噪声输入对伺服系统的影响。
第三章 介绍了经典滤波器中的有限长冲击响应数字滤波器和无限长冲激响应滤波器,并基于MATLAB设计滤波器,加入伺服系统中,观察滤波效果以及分析滤波器对系统的影响。
第四章 介绍了现代滤波器中的卡尔曼滤波器,基于MATLAB平台编写卡尔曼滤波算法的S函数用于伺服系统中,观察滤波效果以及分析滤波器对系统的影响。
2. 伺服系统分析
2.1 伺服系统的简介
伺服系统是用来精确地跟随或复现某个过程的反馈控制系统,又称随动系统。在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)[15]。伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别,主要包括测装置、信号转换电路、放大装置、补偿装置、执行机构、电源装置和被控对象等部分[16]。伺服控制系统最初用于船舶的自动驾驶、火炮控制和指挥仪中,后来逐渐推广到众多领域,主要有自动车床、天线位置控制、导弹和飞船的制导等[15]。
图2.1 伺服系统的三环结构
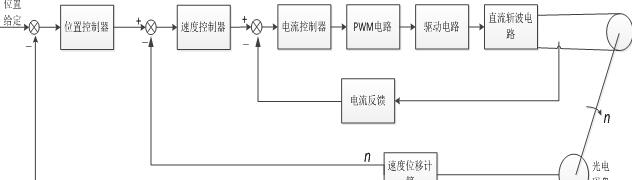
运动伺服系统通常采用三环控制系统,该系统从内到外分别是电流环、速度环和位置环,如图2.1所示。
2.2 伺服系统的分析
本课题基于MATLAB平台搭建伺服系统,MATLAB是美国MathWorks公司推出的一套用于工程计算的可视化高性能语言与软件环境。它为数字滤波的研究和应用提供了一个直接、高效、便捷的利器。它是以矩阵运算为基础,把计算和可视化同程序的设计融合到了一个交互式的工作环境中[9]。MATLAB推出的工具箱使各个领域的研究人员可以直观便利高效地进行科学研究、工程设计等,其中的信号处理、图像处理、小波等工具箱为数字滤波技术研究的蓬勃发展提供了有力的工具[17]。
基于MATLAB平台,我们搭建稳定的三环控制伺服系统,其系数来源于参考书籍,通过方框图化简,最后伺服系统模型如图2.2所示,其中模块 为位置调节器,将电流环和速度环通过方框化简可得到模块 MATLAB稳定伺服系统的滤波技术研究(2):http://www.751com.cn/zidonghua/lunwen_20145.html