
7 直流伺服系统的软件组成26
7.1 控制系统AT89S52程序26
7.1.1 主程序26
7.2.2 中断程序27
结论29
致谢30
参考文献31
1 引言
1.1 该课题的研究背景和研究意义
伺服系统属于自动控制中的一种,该系统能够保持一定特性地复现输入指令,所以又被称为随动系统 。伺服系统在电机装置控制中占据比重很大的位置,伺服系统中特性比较高的能够提供准度较高、反应较快的驱动。因此,一个伺服系统功能是否完善取决于该系统对电机的控制程度。伺服电机在系统中一般作为执行机构来被使用,所以又称为执行单元。它的主要功能是把系统输入的信号转化为角速度量,然后再输出,使被控制对象进行运动 。与一般人工操作相比,伺服系统对运动模块控制具有很高的反应速度和很高的控制精度。
随着控制理论、微电子、电力技术的应用发展,伺服系统概念在本世纪初也第一次出现。从1934年首次出提出伺服机构这个词后,随着自动控制理论的逐步完善,伺服系统同样在理论和实际运用方面取得了非常大的跨越,得到广泛的使用。随着时代的发展,在每个控制领域机会都能看到伺服系统的应用。
随着伺服系统的不断优化,从表面上看交流伺服系统比直流伺服系统具有更多的优点,所以在控制领域中前者占据更多的使用情况案例,交流伺服系统能够满足大部分控制领域自动化控制的技术要求。但是,直流控制理论比交流控制理论历史更为悠久,发展也较为全面另一方面,交流伺服控制系统又是在直流伺服控制系统的基础上发展的,因而尽管交流伺服系统这几年发展迅速,但是我们还不能完全确定交流系统能否完全取代直流系统称为主导控制系统 。在对于位置精度和速度精度要求比较高的情况下,我们广泛使用直流伺服系统。因为和交流伺服系统相比直流伺服系统的运行平稳性比较高,具有更为简单的构造,文修成本比较低,各个性能还比交流伺服系统高。所以直流伺服系统依然调速领域内占据着很大的比重。
1.2 该课题的国内外研究现状
1.3 该课题主要研究内容
该课题从直流伺服电机的原理出发,研究直流伺服电机的工作原理,明白直流伺服电机的运动控制、驱动方法、运行特性等等。根据该课题的要求设计出整体方案,完成基于单片机的直流伺服电机控制的方案,研究PID在直流伺服电机调速方面的应用。设计整体调速系统的方案和硬件设计。
2 直流伺服电机简介与设计
2.1 直流伺服电机的结构
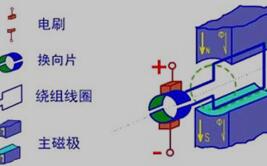
图2.1 直流伺服电机模型图
就工作原理而言,直流伺服电机和直流电机是一致的,他们的基本原理都是通电导体在磁场中受到磁场力。不同点是它因为是在伺服系统中所以有速度或者位置反馈装置,以便满足快速反应的要求 。直流伺服电机的主要组成部分是定子和转子。其中固定部分有磁铁和电刷,磁铁在这里被称为主磁极;转动部分有环形铁芯与绕组,绕组是环绕在铁芯上。
如图2.1所示,该图显示的是一个简易的两级直流电机的模型,一对直流励磁静止的主磁极S与N装设在固定部分(定子)上;旋转部分(转子)上装有电枢铁芯。定子和转子间有一空隙。在图2.1可以看到换向片,换向片间相互绝缘,有换向片组成的整体叫做换向器 。 MATLAB单片机数字伺服系统控制程序设计(2):http://www.751com.cn/zidonghua/lunwen_24000.html