
随着航空航天、化学工业、计算机等技术的迅速发展,控制系统的自动控制水平也随之提高,规模也逐渐扩大,复杂性也随之增加[5]。由于系统结构的复杂性和高负载地不断工作,系统在正常工作过程中,发生故障也就不能避免,如传感器、执行元件、控制部件及闭环系统自身都有可能发生失控。
容错控制从上世纪开始发展,它是一门融合性较强的技术。它之所以发展这么快就是当时国际形势的影响即军事领域的应用[6]。美国空军从上世纪70年代起就连续投入大量的人力和物力从事容错控制技术的研究,目的就是为了研制出具有高科技容错能力的歼灭机。以致当飞机在多个翼面受到破坏时,也能保证战斗机的正常运行工作能力[7]。容错控制还应用于智能化、结构优化、数学建模等工程实用性较强的学科。此外,它还与神经网络、鲁棒控制、故障诊断、自适应控制、信号分析及人工智能等融合运用[8],有着重要的研究价值,值得我们广泛关注。
1.2容错控制系统的几种设计
控制系统一般包括:传感器、控制部件、执行元件及被控制的对象。还包含计算机或FDD等单元模型,同时每个单元包括硬件、电子、软件及其他因素的综合[9]。下图为容错系统设计的结构图,如下图所示。
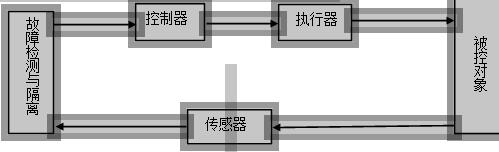
图1 控制系统结构图
容错控制一般分为主动和被动,下面就4种应用广泛的容错控制系统进行解说。
1.2.1鲁棒容错控制设计
在实际系统中,会有许多因素影响系统的稳定性如变化的环境、非线性的元件及系统自身问题等。而设计鲁棒容错控制,就是为了克服系统参数变化导致系统不稳定。它是利用李雅普诺夫的稳定性定理,构造反馈系统对控制部件中的不确定和极小的故障不敏感,故使其保持渐进稳定[10]。
如图2所示:
简单的反馈系统
如不确定系统的表示方法为: (1)式中,x(t):n文状态向量;u(t):m文控制变量;A:定常系统矩阵; 基于串级反馈系统的容错控制设计(2):http://www.751com.cn/zidonghua/lunwen_31095.html