
③编译预警执行程序,对硬件电路进行软件的设计。
④通过LabVIEW进行侧翻预警显示的模拟仿真。
第二章 零转弯半径割草机的侧翻预警方法的研究
2.1 零转弯半径割草机侧翻预警和总体实现
2.1.1 零转弯半径割草机的侧翻指标的选定
零转弯半径割草机侧翻是指在工作行驶过程中绕纵轴线转动90°或更大的角度,机身与地面相接触的一种危险的侧向运动。在研究侧翻的文献中普遍将侧翻指标的选取主要有侧向加速度,侧倾角和横向载荷转移率三种。
以横向载荷转移率(LTR)为指标,LTR定义为左右侧车轮垂直载荷之差和总的轮胎载荷比值,即
(2.1)
其优点是不要估计车身侧倾角的临界值,因为横向载荷转移率侧翻时,左右轮胎垂直载荷发生转移,LTR的变化范围为[-1,1],当LTR=0时,左右车轮的载荷相等,表明没有发生侧翻;当|LTR|=1时,其一侧的轮胎的载荷为零,即一侧轮胎离地,表明发生侧翻。通过行驶动力学控制系统防止其发生侧翻,阻止各个车轮离开地面;缺点是所选参考模型的复杂程度、算法步长的选取和预警时间门槛值的选取都要仔细地考虑合适与否;如果上述选择不合适,将会导致预警结果不准确,不能达到侧翻预警目的。
以侧倾角和侧向角速度作为判定侧翻标准的优点是对参考模型复杂程度和算法步长的选取没有规定,主要缺点是侧翻条件的门槛值需要进行估算。
以侧向加速度作为判定侧翻标准,通过对侧翻相关的参数进行检测,计算检测到的参数,得出当前的侧向加速度,判断是否超过侧翻临界值,若超过侧翻临界值则发生警报或开始侧翻控制。这种方法简单明了,易于实现,可以实现对侧翻的检测和报警功能。
综合以上优缺点,考虑到零转弯半径割草机具体的工作方式,本文选择的侧翻预警指标是零转弯半径割草机的侧倾角。以车身侧倾角作为预警算法指标,与其他的预警算法指标相比,根本区别在于它适合于零转弯半径割草机侧翻预警,能够实现对割草机侧翻预警控制。其缺点是要估计侧翻条件的门槛值,而割草机的侧翻条件的门槛值能够通过分析得到,即侧倾角的阈值,所以缺点可以进行克服。
2.1.2 零转弯半径割草机防侧翻预警实现的策略
防侧翻预警的策略就是侧翻预警器 根据传感器所采集的信息(侧倾角)和已经通过测量计算分析出来的侧倾角度的阈值进行比较,采取相应的预警措施。其预警实现的策略框图如图2-1所示。
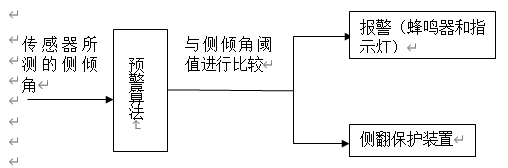
图2-1 预警实现的策略的总体框图
2.2 零转弯半径割草机侧翻预警模块
2.2.1 零转弯半径割草机的侧倾角的阈值
零转弯半径割草机的割草装置(如图2-2)采用轴承、弹簧压紧式导向机构,可视为固定连接在割草机底盘。考虑割草机前轮固接,后轮无悬挂。则可视为刚体旋转,翻滚轴为下坡方向两轮与坡道接触点连线移轴。所以初始翻滚模型中可将割草器视为刚体,其侧倾角的阈值,主要取决于质心的高度,驱动后轮之间的距离。建立模型分析零转弯半径割草机的侧倾角的阈值
AT89S52单片机零转弯半径割草机侧翻预警装置设计+源程序+电路图(4):http://www.751com.cn/zidonghua/lunwen_54142.html