
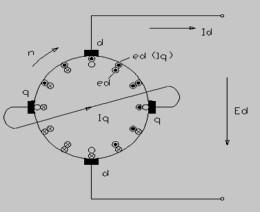
图 2.1交磁电机扩大机原理图
3. 某武器型号直流电机扩大机伺服系统的电路分析
3.1 调速电路
调速及外部放大模块如图3.1所示,平常时由FXXH输入,减速时由FXJS输入,此时R1右端电位降低,通过内部放大和驱动电路后,控制电机减速。其中,两个不同向的二极管可以防止意外的高压对放大器的损坏。右侧电路为一反相比例运算电路,理想运算放大器具有“虚短”和“虚断”的特性,虚短是指由于运放的输出电压有限,因此,可以把两个输入端视为等电位。开环电压增益越高,两个输入端的电位越接近于相等。
虚断是指由于运放具有很大的差模输入电阻,通常为1M 及以上,因此,流入运放输入端的电流往往远远小于输入端外电路的电流。故通常可把运放的两个输入端之间视为开路。输入电阻越大,输入端之间越接近于开路。这样,集成运放两个输入端几乎没有电流,可以忽略不计,电阻PW2引入电压串联负反馈,输入信号经电阻R1,接到运放的反相输入端,同向输入端R2接地。一般选择R2=R1//RPW2。
据虚短虚断原理
V0=-if*R PW2=-Vi/R1* R PW2
Avf=Vo/Vi=- R PW2/R¬1
当R PW2=R¬1时,Avf=-1,此时输出电压与输入电压幅值相等,相位相反。此电路中,通过调节PW2,使得其阻值与R1相等,则可将输入精确的反相放大。
其中PW-JS1最大值为100K ,PW2最大值50 K ,R1=10 K ,FXXH输入为 10V。
3.2 调零电路
调零电路如图3.2所示。其中R6=R7=1K ,调节PW-TN1,使得当输入电压为0时,系统的输出电压为0。由于R6,R7左右输入的电压值比较高,为 15V,而调零时的电压应该在一个较小的范围内,所以我们加入了如图所示的4个2级管,使得PW-TN1的调节的范围变小。
直流伺服系统的原理分析及驱动电路故障检测设计+程序(3):http://www.751com.cn/zidonghua/lunwen_69235.html