
5.Acrobot、Penduot等其他形式的倒立摆系统
主要是机械结构不同,其被控对象的本质为非线性欠冗余机电系统没有发生变化,因而对系统的研究手段和研究方法是一样的。
对于多级倒立摆系统,有两种基本的形式:串联倒立摆系统和并联倒立摆系统。所谓串联倒立摆系统是指对各摆杆“头尾”相接,呈串联形式连接。而并联倒立摆系统是指多个摆杆底端都连接在“小车”上,呈并联形式连接。串联倒立摆系统中各摆杆任何一个的角度、角速度、角加速度变化都会对另外的摆杆角度、角速度、角加速度产生影响;而并联倒立摆系统每个摆杆的状态变化不受其他摆杆状态变化的影响,只与水平连杆的角速度及角加速度有关。
几种不同类型的倒立摆系统实物如图1.1所示。
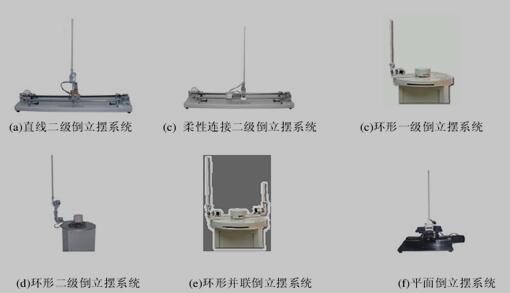
图1.1 各类倒立摆系统
1.3 倒立摆系统简介
当人用手托起一根立起的竹竿时,他会通过手臂的不断移动来保持平衡,使竹竿不倒。假如两根竹竿上下在一起(自由连接),还能长时间保持稳定直立么?通过实验仪器将这样的两根棍在自由连接状态下立起来,最下边的一根棍与滑轨上的一个小车自由连接。通过小车在滑轨上左右移动来保持两根棍上下立在一起不倒。从科学的角度讲,这就叫二级倒立摆。二级倒立摆装置如图1.2 所示:
图1.2 直线倒立摆本体 图1.3 电气控制箱
本实验控制装置是由固高科技(深圳)有限公司开发的直线倒立摆系
统。倒立摆系统包含倒立摆本体、电控箱及由运动控制卡和普通PC机组成
的控制平台等三大部分。
图1.4 倒立摆系统组成框图
直线倒立摆本体:直线倒立摆本体(参见图1.2)由基座、交流伺服电机、同步带、带轮 、滑竿、滑套、滑台、摆杆、角编码器、限位开关等组成。小车由电机通过同步带驱动在滑杆上来回运动,保持摆杆平衡。电机编码器和角编码器向运动控制卡反馈小车和摆杆位置( 线位移和角位移)。
电气控制箱:电控箱(参见图1.3)内安装有如下主要部件:交流伺服
驱动器、I/O接口板、开关电源、开关和指示灯等电气元件。
控制平台:控制平台主要由以下部分组成:与IBM PC/AT机兼容的PC机、GM400运动控制卡、GM400运动控制卡用户接口软件、演示实验软件。
1.4国内外研究情况
1.5 遗传算法的研究概况
20世纪60年代美国Michigan大学Holland教授及其学生受到生物模拟技术的启发,创造出一种基于生物遗传和进化机制的适合于复杂系统优化的自适应概率优化技术——遗传算法。在1967年,Holland教授的学生Bagley在其博士论文中首次提出“遗传算法”一词,他进一步发展了复制、交叉、变异、显性、倒位等遗传算子,在个体编码上使用双倍体的编码方法。Holland用GA思想对自然和人工适应系统进行研究,提出GA的基本定理——模式定理(Schema Theorem),并与1975年出版了第一本系统论述遗传算法和人工自适应系统的专著《Adaptation Natural and Artificial System》。20世纪80年代,Holland教授实现了第一个基于遗传算法的机器学习系统,开创了遗传算法的机器学习的新概念。
1975年,De Jong 基于遗传算法的思想在计算机上进行了大量的纯数值函数优化计算实验,建立了遗传算法的工作框架,得到了一些重要且具有指导意义的结论。1989年,Goldberg出版著作《Genetic Algorithm in Search,Optimization and Machine Learning》,系统地总结了遗传算法的主要研究成果,全面完整地论述了遗传算法的基本原理及其应用。1991年,Davis出版了《Handbook of Genetic Algorithms》一书,介绍遗传算法在科学计算、工程技术和社会经济中的大量实例。1992年,Koza将遗传算法应用于计算机程序的优化设计及自动生成,提出了遗传编程(Genetic Programming,简称GP)的概念。 倒立摆系统的多模型切换控制及仿真(3):http://www.751com.cn/zidonghua/lunwen_74803.html