
这就需要采用单片机对步进电机进行加减速控制,实际上就是改变输出脉冲的时间间隔,单片机控制步进电机加减法运转可实现的方法有软件和硬件两种 ,软件方法指的是依靠延时程序来改变脉冲输出的频率,其中延时的长短是动态的,软件法在电机控制中, 要不停地产生控制脉冲, 占用了大量的CPU 时间,使单片机无法同时进行其他工作;硬件方法是依靠单片机内部的定时器来实现的,在每次进入定时中断后,改变定时常数,从而升速时使脉冲频率逐渐增大,减速时使脉冲频率逐渐减小,这种方法占用CPU 时间较少,在各种单片机中都能实现,是一种比较实用的调速方法。
2硬件的设计
2.1平台的骨架的设计
我的这个三维平台的设计的灵感来自于国外的3D打印机。我观察了国外的各种3D打印机,然后根据自己的理解理解设计了一个三位平台。图2.1.1是我第一次的设计方案。在实际动手做的过程中我发现我的有些设计不太合适实际。所以很多细节部分更改了,使得更接近实际情况并解决问题。从实际出发考虑问题,最终初步确定了大部分细节部分,改进了外观使得更为方便。图2.1.2是更改了后设计出来的图片。设计的材质是有机玻璃。但最后为了节约用了其他的材料。图2.1.3是我做出来的实物图。
我的这三维平台骨架主要是用不锈钢材料,内部的一些零部件是用铝合金做的,使得能达到降低成本,容易加工做,减轻质量等目的。
这个三维平台的内部零件有光轴,光轴支架,滑块,电机支架,光轴固定支架,齿轮固定支架,移动平台支架以,固定螺丝,步进电机等。其中光轴,滑块,光轴支架,电机和螺丝可以从市场上买的到的。其他零部件要自己加工。以下的是我根据已买到的零部件设计制作的零部件图。
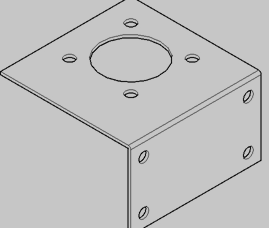
图2.1.4 X电机固定支架 图2.1.5 Y电机固定支架
图2.1.6 Y轴固定支架
图2.1.6 Y轴固定支架。这支架有两种,一种是如图所示的状态,另一个是折弯另一个方向,就是跟另一个支架对称的。
图2.1.7 皮带固定片文献综述
这皮带固定片有两组。一个是用来固定X轴上的皮带,另一个是固定Y轴上的皮带。他们的形状一样,尺寸稍微有差别。
图2.1.8 X轴上的齿轮支架 图2.1.9 Y轴上的齿轮支架
图2.1.10移动平台架
2.2步进电机
步进电机是将电脉冲信号变换成角位移或直线位移的执行部件。步进电机可以直接用数字信号驱动,使用非常方便。一般电动机都是连续转动的,而步进电动机则有定位和运转两种基本状态,当有脉冲输入时步进电动机一步一步地转动,每给它一个脉冲信号,它就转过一定的角度。步进电动机的角位移量和输入脉冲的个数严格成正比,在时间上与输入脉冲同步,因此只要控制输入脉冲的数量、频率及电动机绕组通电的相序,便可获得所需的转角、转速及转动方向。
2.2.1 步进电机的特点
(1)一般步进电机的精度为步进角的3-5%,且不累积。
(2)步进电机外表允许的温度高。步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度完全正常。来~自^751论+文.网www.751com.cn/ ATmega64-16AC单片机数控机床移动平台位置控制(3):http://www.751com.cn/zidonghua/lunwen_75219.html