
Model 750控制力矩陀螺系统由电动机械设备、实时控制单元、ECP软件三个子系统组成。用户在ECP软件中编写控制算法,然后将其下载到DSP板上,DSP板根据控制算法产生相应的控制信号输出到控制箱,控制箱输出系统电动机构的电机的驱动电压。三者之间的关系如图2.1所示。
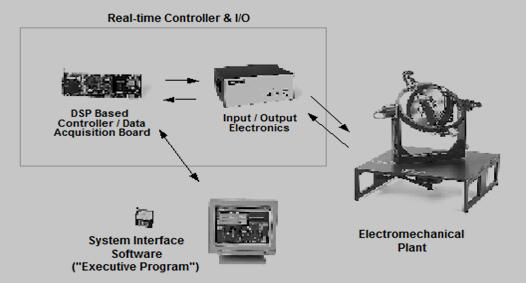
图2.1 Model 750系统组成
2.1 电动机械设备
Model 750系统的电动机构如图2.2所示。图中标出了系统的四个转动轴。
该设备由CMG机械系统及其驱动器和传感器构成。其中,两个稀土永磁式直流电机可用来驱动机械系统运动,四个高分辨率的编码器可以提供精确的框架角位置反馈,低阻尼的滑环用于传递各个框架的信号。
CMG机械系统如图2.3所示。铜转子D悬挂在拥有四个自由度的设备上,它的旋转力矩由电机1提供,角位置通过光电编码器1测量。电机2驱动框架C,编码器2可测量其相对于框架B的角位置。框架B绕轴3旋转,其相对于A的角位置由编码器3测量。框架A绕轴4旋转,编码器4测量其相对于惯性坐标系的位置。
图2.2 系统的电动机构 图2.3 CMG机械系统
框架B绕轴3的运动以及框架A绕轴4的运动可以通过控制箱上的抱闸——闸3和闸4来控制。若锁紧抱闸,则相应轴的运动被锁定,由此可以降低系统运动的自由度。
此外,框架A,B,C上分别安装有惯性开关。当框架A和B的转动速率超过一定值或框架C的运动超过一定的位置时,惯性开关动作,造成控制箱断电,从而保证系统的安全性。
2.2 实时控制单元
如图2.1所示,Model 750系统的实时控制单元由DSP板和控制箱两部分组成。
DSP板如图2.4所示,安装于PC中。它用于执行控制算法、生成跟踪路径、采集数据和系统输入输出,同时对系统进行安全监测。它支持从简单到复杂的控制策略,最高可以1.1kHz的速率执行控制算法,因此,系统不受高阶滤波器和连续控制算法的限制。DSP包括两个标准的和两个可选的D/A转换器。其中,两个标准的D/A转换器为控制箱提供控制信号,两个可选的可用于输出系统实时的模拟状态,通过示波器或绘图仪来观察这些信号。D/A转换器的数字量输入范围为-32768~+32768,对应输出模拟电压范围为-10V~+10V。此外,DSP还不停地监测系统是否存在超速、超限、过流等现象,为系统的安全运行及可靠性提供了保障。DSP板所有的输入输出信号都经过光电隔离,从而可以减小噪声的干扰。
图2.4 DSP板
控制箱外观图、面板示意图分别如图2.5和图2.6所示。控制箱采取了一系列的措施来保证系统可靠运行,例如安装有辅助电源、光电隔离、电路保险丝等。箱内有伺服电源、辅助电源、放大器、辅助D/A转换器等。控制箱通过扁平电缆分别连接到Model 750的机械设备和DSP板。面板上有轴3和轴4的抱闸开关,通过拨动开关使轴3或轴4的抱闸开启或关闭,控制系统的自由度。此外,可以通过电源开、关按钮来启动、关闭系统。
图2.5 控制箱外观图 图2.6 控制箱面板示意图
2.3 ECP软件
ECP软件工作在Windows操作系统下,它是用户与系统的接口,支持控制器定义、轨迹定义、数据采集、作图等功能,控制策略的编写类似与C语言,内置的自动编译器提供了高效的下载和执行实时代码的功能。 Model750系统的建模与控制(4):http://www.751com.cn/zidonghua/lunwen_75379.html