
2 设计方案的论述
2.1 系统框图
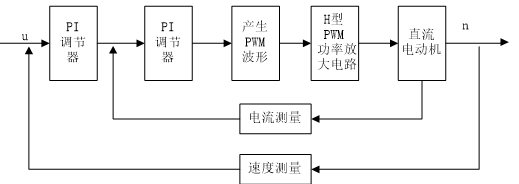
图2-1 可逆调速控制系统整体框图
如图2-1所示为可逆调速控制系统整体框图。由反馈原理可知,要想保证系统中的一个物理量不变,那么我们就要引入一个反馈,使系统成为一个闭环系统。图中有两个PI调节器,对应的分别是电流和转速,电流调节环在里面,叫做内环。转速调节环在外面,叫做外环,内环的采样周期小于外环的采样周期,二者之间实行首尾相连在一起。转速调节器的输出作为电流调节器的输入,用电流调节器的输出作为H型PWM功率放大电路的控制电压。因此,通过电流负反馈和转速负反馈,构成了转速电流的双闭环调节系统。文献综述
2.2 系统的组成
2.2.1 直流可逆调速系统的主电路
对电动机进行转矩控制可以实现电动机的正反转,要想改变电动机的转速和方向,以通过改变电动机电磁转矩的大小和方向,有以下两种情况:
1)电动机在转的时候,其负载的转矩方向不变。例如升降机,无论上升或下降运动,重物产生的转矩方向都不变,如果电动机产生的电磁转矩大于负载转矩,升降机作上升运动,如果电动机产生的电磁转矩小于负载转矩,升降机作下降运动。
2)负载转矩方向随转向而改变,大多数生产机械都有这个特点,如龙门刨床刨台的运动和可逆轧机等。
改变电动机励磁方向或电枢电流方向都可以改变电动机转矩的方向,现代电动机调速系统都是通过电力电子变流器向电动机供电的,而电力电子器件的单向导电性使变流器只能输出单方向电流,这为电动机电枢电流或励磁电流改变方向带来了复杂性,因此,如何改变电流方向是可逆系统要解决的重要问题,也是学习时要注意的问题。
(1)负载转矩方向不变时的可逆调速系统
负载转矩方向不变(位能负载)时的可逆调速,调节电枢电流的大小可以改
变电动机的转矩而控制转向,这时电流的方向不变,因此用一台变流器就可以进行电动机的转向控制。例如图2-2所示的升降机可逆调速系统,电动机由一台电力电子变流器供电,采用转速和电流双闭环控制。
图2-2 升降机可逆调速
1)升降机上升阶段 当转速给定Un*为“ + ”时,发出提升指令,转速调节器(ASR)输出为“+”,电流调节器(ACR)输出为“+”,变流器工作于整流状态,电动机工作在电动状态,电动机电枢电流 ,当电动机转矩大于重物的负载转矩时(Te≥TL),提升重物,转速闭环使重物以给定速度上升。如果重物在空中转速给定调节为“0”,由于电流调节器的积分作用,输出Ui*保持着一定值,使变流器输出电流与负载平衡,重物可悬停在空中(n=0)。若重物有下降趋势使电动机转向改变,将引起转速反馈信号Un极性从“-”变“+”,但ASR输出Ui*和ACR输出Uc的极性仍为“+”,变流器工作状态保持不变,这时输出电压、电流增加,转矩增加,保持重物在空中悬停。为了保证重物在空中的可悬停,升降机一般还用电磁抱闸确保重物不会下坠。
2)升降机下降阶段 若转速给定Un*变“-”,发出下降指令,ASR输出和ACR输出变“-”,变流器输出电压Ud由“+”变“-”,电压的下降使电流减小,当电动机电磁转矩小于负载转矩(Te<TL)时,电动机在重物的作用下开始反转,重物下降。电动机反转使电动势的方向改变,在E>Ud时电枢电流Id=(-Ud+E)/R,但电流的方向仍不变,电流从Ud的“+”极端流入变流器,变流器工作于逆变状态,电动机工作于回馈发电状态,将重物的位能转变为电能回输给电源US。控制变流器输出电压Ud可以控制电枢电流和电磁转矩,从而控制重物的下降速度。 Simulink直流可逆调速PWM控制系统建模与仿真(3):http://www.751com.cn/zidonghua/lunwen_79649.html