
1.3.1不同环境中吸附能力的问题
由于各种功能及个性化的设计追求越来越多,同时则会出现越来越复杂的各类型工作表面,目前的一些负压吸盘在安全性和吸附效率上已经难以满足要求,同时因为玻璃幕墙的形状角度也越来越多种多样,导致与吸附相关的各种技术方面问题,如:紧急情况的处理(强风吹袭等)、密封性、移动灵活和可靠性等,这些问题都与吸附息息相关。
1.3.2 移动灵活性的问题
在实际的幕墙清洗工作过程中,根据实际情况,移动机器人会与清洗系统等相连在一起,这就要考虑到重量问题,这对机器人的载荷能力提出了很高的要求,这也需要使机器人可以尽量能够小型化和轻量化,为了提高清洗效率和移动的灵活性及速度,且使机器人具有很强的跨越障碍能力。这也是机器人灵活性的问题变得越来越重要。
2 清洗机总体设计方案
清洗机的总体结构主要由三个部分构成:地面监控及遥控机构、楼顶辅助及安全保障机构、清洗机本体,如图2.1。
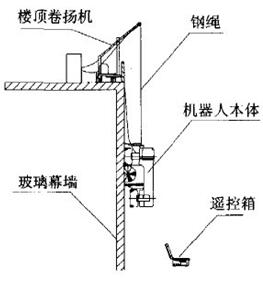
图2.1 智能玻璃幕墙清洗机系统
清洗机本体,在楼顶卷扬机的牵引作用下,同时在吸附系统的作用下吸附在玻璃壁面上,并协调清洗机本体完成移动的功能,且在水循环机构、清洗机构和障碍检测等机构的配合下,完成清洗功能和跨越障碍等工作。
楼顶安全装置用了确保清洗机本体完成清洗和移动任务,并供给本体气源、电源以及水源。
地面遥控装置的作用为:通过实时监视装置来监控壁面清洗的效果,在光电传感器的辅助下,并控制各个执行机构来完成整个清洗工作。
2.1 地面遥控机构的设计
地面遥控机构由光电控制系统和显示系统以及操作系统组成,而整个清洗机器人的控制系统主要由:楼顶安全装置的控制系统、清洗机本体的控制系统、地面遥控装置的控制系统三部分组成。清洗机运行时,楼下控制装置的作用为:对机器人的运行进行监控,同时在必要时进行手动操作,以提高清洗效率和处理意外情况。具体过程为:工作人员通过信号输入设备输入命令,通过无线信号传输系统将信号传输到,清洗机本体上的信号接收装置以及楼顶安全系统的信号接收装置,整个系统在清洗机本体控制系统的控制下,根据预设程序或手动输入信号完成移动、清洗、吸附等功能。同时,在工作过程中,清洗机构和楼顶安全装置上的各种传感器,需采集各类信息,进行综合分析,根据分析结果进行规划,同时将信息反馈到地面遥控系统中,工作人员根据各类信息和参数判断和分析机器人的工作效率和情况,在清洗时发生各种情况,能够及时通过人工调节以实现机器人的安全高效运行,防止意外事故的发生。
2.2 楼顶安全装置的设计
楼顶安全装置主要由导轨装置、编码计数装置、移动小车、电气控制系统、卷扬机构和吸水喷水泵以及水箱组成。卷扬机构安置在移动小车上,楼顶的钢制轨道上安装有移动机构,将卷扬机安装在移动机构中,两者与楼顶的控制装置相连,以完成各项动作。图2.2为楼顶安全装置的示意图。
图2.2 楼顶安全装置示意图
2.3 清洗机本体的设计
依据玻璃幕墙清洗机器人的清洗功能要求,清洗机本体的设计主要用于清洗功能、移动及吸附功能的实现。此次毕业设计的玻璃幕墙清洗机器人系统主要由移动及吸附系统和清洗系统两个部分构成。移动过程与清洗过程分开进行,当机器人稳定吸附后开始清洗,相对于移动与清洗同步进行,这样的过程有利于清洗的清洁度。 智能玻璃幕墙清洗机结构设计+CAD图纸(3):http://www.751com.cn/jixie/lunwen_16704.html