
1.3 多体系统传递矩阵法
国内外对于多系统动力学的研究,一致都投入了很大的精力,不断推动着现代复杂机械系统工程技术的发展。虽然这些研究方法风格迥异,但都有以下几个共同点:①都需要列出系统的总体动力学方程,这部分是各种研究方法的精华所在,也是研究人员所需要重点解决的问题;②复杂系统总体动力学方程所包含的方程一般阶次比较高,处理起来比较困难。因此,就需要寻找降低动力学方程阶次的方法,以解决复杂系统矩阵阶次过高所带来的求解困难,这就是多体系统动力学领域需要解决的主要问题。[13-16]
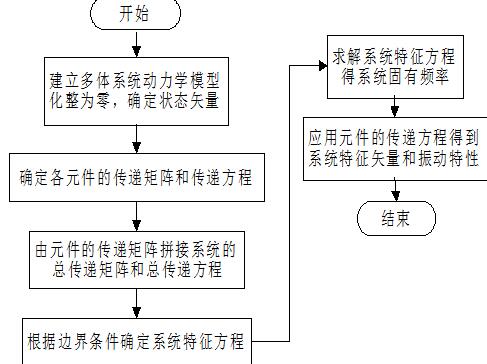
多体系统传递矩阵法很好的解决了这个问题,能非常便于发射动力学的高度程式化,为发射动力学研究提供了一个非常有效的解决方法,受到了国内外的重视。对于线性多体系统传递矩阵法,其求解步骤如图1.1所示。[17-19]
2 发射动力学模型
2.1 坦克武器系统组成
坦克武器系统一般包括身管、炮尾、反后坐装置、摇架、高低机、平衡机、炮塔、方向机、底盘、扭杆、减震器、履带、负重轮等。按照各个部分的运行状态划分,可以将坦克武器系统划分为后座部分、起落部分、回转部分、悬置部分和行走部分等。其中,坦克后座部分包括身管、炮尾、反后坐装置等;起落部分是一些随摇架一起运动的部件,包括摇架、高低机和平衡机以及全部的后座部分等;回转部分由方向机、炮塔、全部起落部分等随炮塔一起运动的部件组成;行走部分主要是用来支撑坦克的重量,并推动它向前行驶的部分,主要包括负履带、重轮等;而悬置部分则是连接行走部分和底盘的部件,包括扭杆、减震器等。
2.2 坦克武器系统发射动力学模型
以某一型号坦克为例,按照坦克武器系统组成划分,能将它划分成以下几个部分:负重轮、车体、回转部分、起落部分、身管、炮尾,由于每个部件自然属性不同,分别将它们看作刚体、集中质量和弹性梁。在多体系统传递矩阵法中,刚体、集中质量和弹性梁等均被视为“体”,“体”和“体”之间的联接被称作“铰”(例如:滑移铰、弹性铰、光滑铰等),铰的质量忽略不计,我们将它的质量计入与铰相邻的“体”中,并对“体”和“铰”进行统一编号。如图2.1所示,为坦克武器系统的发射动力学模型。将支撑坦克的地面视为无穷大的刚体,编号为0;负重轮与地面0的接触是通过履带完成的,我们可以用联接负重轮和地面的3个方向的弹簧组和并联的阻尼器来代替,依次编号1,2,…,12;负重轮可以看作为集中质量,依次将12个负重轮编号为13,14,…,24;我们可以用3个方向的弹簧组和并联的阻尼器来等效每一个负重轮与车体之间的联接,并依次编号为25,26,…,36;车体、回转部分、俯仰部分、炮尾依次编号为37,39,41,44;方向机的作用以及元件37与元件39间的联接、高低机和平衡机的作用以及元件39与元件41的联接扭簧和弹簧及与其并联的阻尼器的编号依次为38、40;回转部分与俯仰部分、身管与俯仰部分之间的联接扭簧和弹簧以及与其并联的阻尼器的编号为42,、43;按照身管的结构特点,将身管划分成6段,每一段视为均质等截面的空间弹性梁,编号依次是45,46,…,50;炮口编号为51。因此,坦克系统发射动力学模型可概括为:在地面支撑和弹炮耦合的由各种铰相联接的4个刚体、6个弹性体和12个集中质量所组成的多刚柔体系统。 坦克武器系统发射振动测试分析(3):http://www.751com.cn/jixie/lunwen_20633.html