
1.2 工业机械手发展状况
计算机和人类数字化自动技能在不断更新中成长,工业机械手系统也在面临着改朝换代,最初期,是经由机械手操控箱和示教盒构成示教型再现机械手,可根据先前编写的程序,反馈到控制器中控制机械手动作,现在在产业中使用最普遍。中期发展成它能够感受外力,温度和影像的触感型机械手,它有力量对一些外界消息实行配合改整,现今正在应用时期。目前研究的最与人类相似,能够感受到内外部环境的变化,从而自身作出应对判断的智能型机械手,它在工作环境改变,或紧急状况下,也能够成功地完成任务,它尚处于实验研究阶段。
工业机械手主要包含专业的电机减速器、操控轨迹的示教盒和测试感应装置仪三部分,它能够在三维立体空间完成各种作业,是高仿真于人类的自动操作控制系统,也是自动机电一体化的生产设备。工业机械手尤其适用于应用在大批量,多种类的柔性出产。它具有加强产品摆放稳定性,提高企业生产效率,节省生产到出厂时间,改善劳动条件,较快适应社会的更新换代的优势。
近调查显示,中国工业机械手近五年(2010~2015年)的安装机械手情况结果如下图显示:
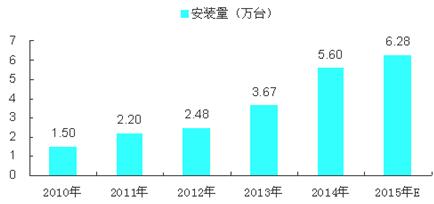
图1.1 工业机械手安装量显示图
我国机械手应用市场具有较大的上升空间,而经预测,我国未来5年机械手销量将不断增加,结果显示如下图所示:
图1.2 销售量显示图
各种统计表明,工业机械手的成长在不断壮大,而我国自动化行业的开发也将会迈出巨大的一步。虽然现在我国的工业机械手技术与外国等一些国家还具有一定差距,但是目前我国在这方面的研究也有一定积累。为增加我国关节型机械手在国际销售中的地位,促进工业文化成长,在过去十年里,国内浮现出一大批实力较强的科研项目基地。沈阳新松公司在为了满足客户在特殊条件下的规定要求,完美开发研制了码垛机械手系统。这足以说明国内在研究方面的成长是有很可观的增长空间。
同样集中我们所关注的码垛行业,码垛机械手的出现不仅能够改善劳动环境,而且还可以减轻劳动强度,降低能耗,保证人身安全,减少辅助设备资源等方面具有重要意义。码垛机械手在运输工业中,加速物流运送速率,并且得到统一规整的物垛,降低物料破损与丢失。因此,码垛机械手将逐步替代传统码垛机实现生产制造一体化的新方向。目前,工业机械手四巨头都有相应的码垛机械手出售(ABB的IRB60产品,KUKA的KR320PA产品,FANUC的MR产品YASKAWA的MPL产品)。下图为库卡码垛机械手在作业的场景:
图1.3 KUKA(库卡)货盘堆垛机械手KR120 R3200 PA 码垛饲料
1.3 研究方案
工业机械手的构型种类很多,直坐标型,球坐标,关节型以及圆柱形等等。本课题主要设计关节型工业机械手,相对机械手本体尺寸来讲,关节型机械手优点在于动作收缩自如、结构紧凑,占地面积小。共四个运动方式,腰身连接底座的旋转,大臂俯仰运动,小臂伸缩运动,手腕辗转运动。机械手由自由度,作业范畴,承重能力这三个技术参数构成。自由度指机械手所具有的独立坐标轴运动的数目,不包括末端执行器的开和自由度,机械手的一个自由度对应一个关节因此本设计采用四个自由度:腰的旋转,大臂起落,小臂伸缩,腕部回转;关节型码垛机械手常见本体多为四轴,因为码垛精度没有机床上下料搬运精度高,在成本较低,投入资金较少,效益提高这几方面,四轴码垛机械手足以满足日常码垛要求。抓重50Kg。由于是关节型,在运动方面较灵活。所以在控制方面加入的示教盒可以很好地控制定位点。 关节型的码垛工业机器人结构设计+CAD图纸(3):http://www.751com.cn/jixie/lunwen_62457.html