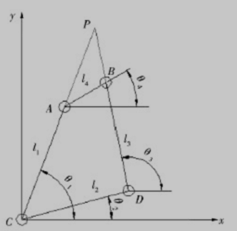
图1 膝关节四杆机构图
由图1,取向量多边形ABCD的各边分别向x轴和y轴投影,则有:
根据计算与仿真需要,对上式进行合并变化,消去过程变量 ,得到 和 的关系式的关系式:
式中:通过运算分析,知式(1)中的“ ”取“ ”号时计算得出的 与实际情况不吻合,因此该式中应取“ ”号。
Adams智能假肢膝关节仿生机构设计与运动学分析(3):http://www.751com.cn/jixie/lunwen_69249.html
图1 膝关节四杆机构图
由图1,取向量多边形ABCD的各边分别向x轴和y轴投影,则有:
根据计算与仿真需要,对上式进行合并变化,消去过程变量 ,得到 和 的关系式的关系式:
式中:通过运算分析,知式(1)中的“ ”取“ ”号时计算得出的 与实际情况不吻合,因此该式中应取“ ”号。
Adams智能假肢膝关节仿生机构设计与运动学分析(3):http://www.751com.cn/jixie/lunwen_69249.html用于火箭弹射发射的缓冲油缸,以减缓和消除弹射末端活塞与缸...
对六角车床转塔刀架的设计,其结构相对简单,但是换刀迅速,...
φ200~φ400mm桶体内壁钻削专用动力头的设计。它提供了一种在车床...
从绪论开始围绕视觉系统进行设计研究。独立绘制图纸,结合论...
针对了机械手的腰座、手臂腕部和机械手爪,上料台机构,即对...
完成了数控直线落料机滚轮工作台设计的总体设计,以及滚轮工...