- 上一篇:底排弹减阻特性分析
- 下一篇:行星差速器试验台设计
1.2.2 国内发展状况
从国内来看,对反求工程的研究开始于上世纪80年代。国内第一台万能测量机研制于1982年,对我国反求工程技术的研究意义重大。后来同一机构又研制出CLZ86型三坐标测量机。直到20世纪末,反求工程技术在我国的发展速度才逐渐加快,由于之前的研究匮乏,我国在反求工程领域的研究成果还无法达到国外的水准。如今,随着我国经济实力的不断发展,也引进了不少国外的先进技术与设备,并且投入了大量的人力物力与财力,在国外的科研基础之上,学习国外的研究成果,加强研究分析,不断自主创新,开发有新特色的产品与技术。
1.2.3 发展趋势[4]
反求工程技术在当今已经成为人们日益关注的焦点,在许多方面也取得了不少的成果。现在,反求工程技术正朝着如下几个方向发展:
(1)、数据测量精确化;
(2)、数据预处理智能化;
(3)、曲面重构复杂化;
(4)、整体技术集成化。
1.3 机械手的国内外发展状况及发展趋势
1.4 本文的研究思想和主要内容
本文设计的机械手,是基于对人手的手掌结构以及运动规律的研究之上的,在对人手研究之后,运用反求工程技术,仿照人手掌的结构,进行五指结构机械手的设计研究。在研究了人手掌的结构的基础上,首先进行设计、计算,确定手掌各关节的尺寸大小,在基本确定三文结构后,运用D-H矩阵进行数学建模。随后运用solidworks三文软件中的simulation express功能,分析了机械手的主要的部件的强度与刚度,生成了应力图。接着运用ADAMS运动分析软件进行运动学分析与仿真,得到一系列运动学曲线,并且模拟抓取重物,与人手抓取重物的过程相比较,体现反求工程技术的运用。最后,对本次毕业设计的一些成功做了总结,并且对设计中遇到的一些问题、设计中存在的不足做了论述。由于本科阶段所学知识有限,本文设计的五指机械手结构比较点单,功能不是特别复杂。
2 人手结构与抓取运动的分析及机械手模型建立
2.1 人手结构分析
人手的结构如图2.1所示,由图可以看出,人手由手掌以及五个手指所组成,包括小指、无名指、中指、食指和拇指。除手掌外,每个手指都由三个手指关节所组成,可以实现弯曲以达到抓取物体的效果。人手的五个手指可以单独运动,完成弯曲等活动。指节与指节之间也能灵活转动,达到弯曲一定角度的目的。手掌内还有一些关节,在此不是分析的重点,在进行机械手设计时,主要模拟人手手指的三个关节的结构与运动方式。
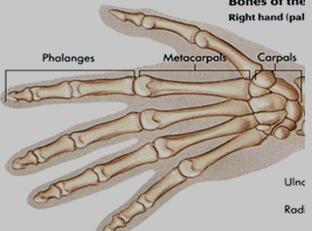
图 2.1 人手掌结构图
由此分析,我们可以根据每个手指的结构,单独对每个手指进行建模分析,由于五根手指的结构相似,只是指节长度不一,因此逐个分析各个手指并没有太大的意义,可以在取其中一根手指进行分析后,将另外四根手指指节尺寸带入即可得到各手指的建模分析结果。
2.2 人手抓取运动分析
人手自由度很多,可以比较灵巧的完成多种动作。在人手基础上进行仿人机械手设计,设计的机械手不能完成人手的所有运动,但能完成一些常用的抓取物体、拎物体等运动
-
发动机润滑油对汽车NVH性能的影响研究
-
CAN总线引信装定数据多协...
-
ansys聚能装药与新型爆炸反...
-
MATLAB枪弹射击精度影响因...
-
基于热力学模型的发动机转矩波动仿真研究
-
NUT车队赛车车身的改进设计研究
-
CATIA的NUT赛车转向系统改进设计研究
酸性水汽提装置总汽提塔设计+CAD图纸
十二层带中心支撑钢结构...
杂拟谷盗体内共生菌沃尔...
大众媒体对公共政策制定的影响
河岸冲刷和泥沙淤积的监测国内外研究现状
中考体育项目与体育教学合理结合的研究
java+mysql车辆管理系统的设计+源代码
电站锅炉暖风器设计任务书
当代大学生慈善意识研究+文献综述
乳业同业并购式全产业链...