- 上一篇:PLC玻璃幕墙的吸附式自动清洁装置设计
- 下一篇:转子内扩容汽轮机设计
1.1 国内外仿人双足机器人发展现状
1.1.1 国外仿人双足机器人的发展现状
1.2 本文的主要研究内容
通过对国内外仿人机器人发展现状的研究,可以看出目前已经成功研发出的比较成熟的双足机器人多采用至少12个自由度,但通过查阅相关资料,10个自由度即可实现其基本功能,这10个自由度为在原先12个自由度的基础上去掉髋关节的2个扭转向自由度。
本文在第二章中首先分析并且比较了双足机器人的几种基本结构,从而确定了双足机器人的建模方向。通过对仿人学的研究对各关节进行设计,然后使用SolidWorks完成对双足机器人的虚拟样机的建模工作,为之后的仿真奠定基础。
第三章本文完成了对双足步行机器人的步态规划,针对双足步行机器人分析了倒立摆机构,从而分析了重心变化,并且对双足机器人进行步态规划,从而确定了各关节角度变化,为之后的仿真进行了数学理论支持。
第四章将之前的模型文件导入ADAMS,重新对双足步行机器人的各结构物理特性进行手动输入,然后对模型进行添加约束、施加载荷、构建驱动的操作。之后对双足步行机器人进行了基本的运动学仿真,得出仿真过程中的一些数据,并对数据进行简单的分析。
1.3 本章小结
本章介绍了双足机器人的研究背景,并对双足机器人的国内发展现状进行了总结和分析,之后提出了本文的主要工作内容。
2 双足机器人结构设计
2.1 引言
本文设计的双足机器人主要是为了完成双足行走,这是双足机器人最难实现也是最基本的功能。而双足步行机器人是一个多输入、多输出、多自由度的系统,因此保持双足机器人的稳定性是设计中的难点。与轮式和履带式机器人不同,在行走过程中,双足机器人有双足支撑期和双足支撑期,这是一个动态稳定的过程。所以为了满足这样的要求,需要对双足机器人结构进行合理的设计,配置合理的自由度,规定各关节的运动范围[6]。因此,双足机器人的结构设计对实现双足机器人的功能具有至关重要的作用。
2.2 总体结构的确定
2.2.1 切比雪夫连杆机构
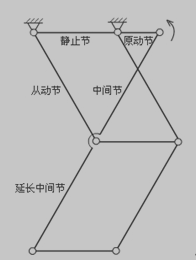
通过查阅相关资料,最早的仿人两足步行机器人采用连杆机构。在尽可能少地布置电机和自由度的前提下,连杆机构是机器人结构设计的理想选择。连杆机构广泛应用于各个领域,如挖掘机。其中有一种名叫切比雪夫的连杆机构,可以基本模仿机械腿的结构,结构简单,且只需要一个自由度就能完成双足机器人的腿部行走控制。如图2.1所示,切比雪夫连杆机构是由原动节、静止节、中间节、延长中间节及从动节组成,原动节的转动可使中间节、延长中间节、从动节进行规定的动作。其中,切比雪夫连杆机构各杆件的长度比须符合:静止节 : 原动节 : 从动节 : 中间节 : 延长中间节 = 2 : 1 : 2.5 : 2.5 : 2.5[7]。
切比雪夫连杆机构
如果把图2.1的结构用作机器人的脚,则切比雪夫连杆机构负责把脚抬起并向前迈出
的动作,而平行杠杆机构则使脚面与地面保持平行(见图2.2)。
切比雪夫连杆机构与平行杠杆结构组合的的动作
2.2.2 五连杆机构
通过查阅双足机器人的结构的相关资料,一种机械腿的结构为五连杆机构。这种双足机器人的结构可以简化为五根杆件相连,如图2.3所示。双足机器人可由躯干、大腿、小腿五个部分组成,在一定程度的近似下, 可以将其化简为五连杆四关节的机构。该双足机器人有4个关节,分别为两个髋关节、两个膝关节,共需控制6个自由度,分别为膝关节的一个前向自由度以及髋关节的前向和侧向两个自由度。
-
两关节地面移动机器人控...
-
CATIA小型履带式机器人底盘...
-
吸附式高楼气动擦窗机器人设计+CAD图纸
-
ATC换刀机器人设计垂直升降系统设计
-
MATLAB排爆机器人稳定平台二维随动控制设计
-
单电动缸驱动的平行伸缩装置码垛机器人设计
-
ansys四自由度并联高速搬运机器人创新设计
当代大学生慈善意识研究+文献综述
杂拟谷盗体内共生菌沃尔...
乳业同业并购式全产业链...
java+mysql车辆管理系统的设计+源代码
十二层带中心支撑钢结构...
酸性水汽提装置总汽提塔设计+CAD图纸
大众媒体对公共政策制定的影响
河岸冲刷和泥沙淤积的监测国内外研究现状
电站锅炉暖风器设计任务书
中考体育项目与体育教学合理结合的研究