- 上一篇:solidworks步进电机驱动丝杠非接触式搬运系统结构设计
- 下一篇:ansys微型钻头的钻头参数对钻头强度及刚度影响的有限元研究
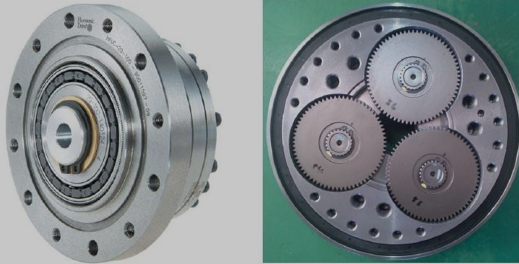
图1-2 谐波减速器与RV减速器
目前国外对 RV 减速器的研究已经比较成熟,并形成比较大规模的减速器产 业。我国对该类减速器的研究比较晚,上海交大机器人研究所,秦川机床都已经 研制了 10 年以上时间,但是由于尚未掌握其设计及加工的核心关键技术,目前
还是没有合格产品出来。 高精度高效率的减速器直接的工业机器人的工作质量和效率,因此更加深入
地进行RV减速器关键技术的研究,不断完善制造工艺、精度保证等方面的关键技 术,对推动我国工业机器人产业的发展有着重要的工程意义[4]。
1.3 国内外研究的主要方向
1.3.1扭转刚度
扭转刚度作为RV减速器的一项重要性能指标,逐渐成为各大高校以及各研 究院分析与研究的热点。目前针对单级摆线传动的刚度特性分析已较为深入。RV 减速器也是一种包含摆线传动的一种二级封闭式行星传动系统,其低速级同为摆 线传动,但传动结构与单级摆线区别较大,扭转刚度特性也会不同。因此,国内 外学者针对该类减速器刚度特性的研究仍在深入[10]。
1.3.2回转精度
差值。它是 RV 减速器的主要性能指标之一。RV 减速器的该项性能直接影响工 业机器人的定位精度,因此如何提高 RV 减速器回转传动精度一直是该领域研究 的重点。目前,针对摆线行星传动机构的误差建模方法已较为成熟,常用方法有 几何法、齿轮齿面接触分析技术法以及微分法等[10]。这些方法理论严密,分析结 果精确,为 RV 减速器的精度 研究提供了有效的借鉴。一方面是研究齿轮修行 对传动精度的影响。
1.4 论文的主要研究内容
RV(Rotary Vector)传动是在摆线针轮传动基础上发展起来的一种新型传动, 它是由第一级普通渐开线直齿轮(斜齿轮)减速部分和摆线针轮减速部分组合而 成的两级 2K-V 行星传动机构。目前在机器人领域应用极为广泛,因而在国内外 受到广泛重视。RV 减速器由于其独特的优点,在机器人(定位构、自动广告机、 机器人手臂、机机器人
腕关节上、分度工作台、机器人回转轴)等精密传动领域得到了广泛的应用。 本文以广泛应用于工业机器人关节的 RV 减速器为对象,通过对其工作原理
的分析,设计符合一定输出要求的 RV 减速器,并用 pro/e 软件构建其三维模型。 针对其结构特点,对其各个结构进行受力分析,并对其相对薄弱的部分(行星传 动齿轮啮合和针齿销)的强度进行校核。然后在 ANSYS 环境下构建其计及输出 结构刚度、轮齿的啮合刚度的有限元模型。根据仿真结果提出在 RV 减速器的设 计过程中应该优化的一些结构。
-
两关节地面移动机器人控...
-
ansys聚能装药与新型爆炸反...
-
CATIA小型履带式机器人底盘...
-
NUT车队赛车车架改进设计研究ANSYS仿真
-
NUT赛车制动系统改进设计ANSYS有限元分析
-
吸附式高楼气动擦窗机器人设计+CAD图纸
-
ANSYS二维弹道修正引信张开...
当代大学生慈善意识研究+文献综述
杂拟谷盗体内共生菌沃尔...
酸性水汽提装置总汽提塔设计+CAD图纸
河岸冲刷和泥沙淤积的监测国内外研究现状
中考体育项目与体育教学合理结合的研究
java+mysql车辆管理系统的设计+源代码
乳业同业并购式全产业链...
十二层带中心支撑钢结构...
大众媒体对公共政策制定的影响
电站锅炉暖风器设计任务书