- 上一篇:液压克令吊国内外研究现状综述
- 下一篇:国内外全向移动机器人的研究现状
国内外摇摆台研究现状目前,国内外已有许多公司或研究所设计出多种形式的摇摆试验台,并被广泛应用到各种平台上,如船舶运动模拟平台、直升机升降模拟平台,甚至是宇宙飞船的空间对接等[2],在加工业中也有多自由度联动机床和灵巧手的制造应用。51258
美国是世界上最早使用摇摆台的国家,他们从20世纪40年代就开始研究摇摆台。所以在研发能力、制造技术和精度控制上都长期处于领先水平。1945年美国麻省理工学院研究并制造了世界上第一台摇摆台—— A 型转台[3]。该转台由于是第一代摇摆台,技术不成熟,缺点还很多,所以没有实际的使用价值。
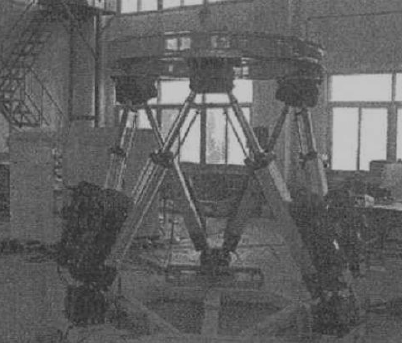
1965年英国高级工程师Stewart在他发表的论文中提出了一种新的平台机构,如图1-1所示,被人们称为Stewart机构。从图中的结构来看,该机构有6个自由度,采用并联式结构,可以沿空间任意方向作移动和方向轴的转动。由于这种结构响应比较快、承载能力较强、输出精度又高,所以在很多领域得到推广和应用,如运动仿真实验、舰船性能实验、航空航天研究等[4]。
Stewart式并联机构
1978年澳大利亚的Hunt教授首次把Stewart平台机构用在了工业机器人的设计上。1986年美国Ficher教授在Stewart 平台上利用转动电机驱动实现了现行机械手臂的运动。随后该机构受到越来越多的重视,并逐渐成为国际学者们争相研究的热点。1998 年第一届国际运动学并联机器研讨会在意大利顺利召开,并在随后的2000 年在美国召开了第二届专题研讨会论文网。
我国对摇摆试验台的研制工作起步略晚,从20世纪70年代末才开始系统的研究但是发展迅速。1991年燕山大学黄真教授研究并制造出我国第一台六自由度并联机器人。1999年王知行教授在哈尔滨工业大学的研究室研制出了BJ-I型并联机床。2000年,北京理工大学在前人的基础上研制出一种新的并联机床,该机床能实现六自由度变轴。现在,国内许多大学和研究所都在积极研究并联机构,并与相关企业合作开发了一些新颖的并联平台。
发展趋势
六自由度并联机器人在铰链约束、支链干涉等因素的影响下,逐渐显露出姿态实现能力差、工作空间小等缺点,因此专家学者们都把目光聚集到少自由度并联机器人的研究上。经过几十年的研究,并联机器人的理论已经较成熟,但实践却比较少。综合来说,并联机器人将着重于奇异位姿和工作空间的研究,以及集成化的探索,而未来摇摆台将会向着模块化、标准化、多功能化发展。