- 上一篇:便携式msp430 JTAG编程器设计+文献综述
- 下一篇:ansys高铁客车车轴轴承接触应力分析
5.1 概述 45
5.2 评价指标 45
5.3 数值仿真对比分析 45
5.4 小结 55
结论 56
致谢 57
参考文献 58
1 绪论
1.1 课题研究背景及意义
目标运动分析(TMA,Target Motion Analysis)这一问题的研究起初是为了解决无源传感器观测系统的有关问题。TMA就是对接受到的有噪声污染的量测信息按数学模型进行计算,从而估计出目标的航向、速度和位置等参数 。纯方位目标跟踪(BOT,Bearings-Only Tracking)是已知信息只有目标相对于观测器方位角信息,而无法测得目标与观测器的距离信息的目标运动分析。BOT运动模型分析从原理上是属于非线性问题模型。所以BOTMA与含有目标与观测器距离的目标跟踪模型从模型建立上就有很大的不同。所以BOTMA的研究主要有三个方面:当目标为一固定模型时,观测器在哪些运动情况下系统才是可观测的;为了更准确的了解目标的运动信息,观测器应该采取怎样的机动轨迹;以及针对不同的目标和观测器运动轨迹,采用哪种合适的滤波算法对获取到的量测信息进行滤波,是滤波结果与真实值误差较小。
首先,BOTMA运动模型根据如何获取目标信息通常可分为:有源目标跟踪和无源目标跟踪 。有源目标跟踪容易暴露自身遭到对方攻击,这是因为它是利用目标反射的回波进行探测,如图1.1所示。而无源跟踪因为使用被动式侦查设备来接受辐射源信号,所以可以很好地克服这一缺点,如图1.2 所示。
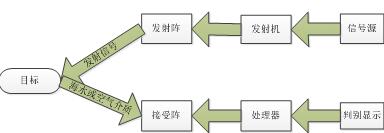
图1.1 主动有源信号流程图
图1.2 被动无源信号流程图
同时,BOTMA运动模型按跟踪模型不同可以分为:线性和非线性跟踪模型。目标运动分析就是对于不同的跟踪目标模型,采用不同的跟踪滤波算法。
BOTMA为了达到不同的效果,根据不同的应用环境可以划分为多种不同的应用方向。民用船只在黑暗的夜晚,就是根据BOTMA模型的控制方法来为运动提供参考。在军事方面,因为BOTMA模型广泛地应用在目标的监测预警上,纯方位目标跟踪技术更也关系到国家的安全,因为对于敌方武器,我们通常难以获得它的有源信息,在这种情况下,无源信息成了我们主要能够获得并加以利用的信息。但是,由于机动出现的多样性、随机性和复杂性,以及观测距离远,对BOTMA模型研究一直有新的进展,但也一直存在亟待解决的问题。
纯方位目标跟踪,只能有无源的目标方位角信息,而不知道目标的位置信息。因此必须通过一定的算法来进行求解,从而能够实现目标定位。
同时,水下目标跟踪多采用纯方位目标跟踪,这是因为通常敌方的目标不可能主动将有源信息发送给我们,而我们可以获得和利用的多是无源的方位角信息。然而,由于BOTMA模型只含有目标和观测器方位角信息,而不含有目标和观测器的距离信息,我们需要建立模型,将方位角经过一系列运算过程,从而得到目标和观测器的距离信息。 同时由于BOTMA模型实际条件下非高斯非线性的特殊性,使得很多常用算法无法适用,比如卡尔曼滤波就不能应用于非线性系统。
1.2 国内外研究现状
1.2.2 国内纯方位目标跟踪的研究现状
1.3 课题研究内容及思路
1.3.1 课题研究内容
本课题的主要研究水下纯方位系统目标跟踪算法研究,主要针对目标做折线运动的BOTMA模型,深入理解EKF、UKF和PF算法。针对CV目标,在观测器作典型折线机动前提下,分别实现对目标跟踪的EKF、UKF和PF算法。在相同前提下,分析比较EKF、UKF和PF算法的特性(实时性、精度等)。以期针对不同情况下的BOTMA模型,分别采取合适的算法和参数,以获得理想的滤波的结果。
-
局部直方图均衡化在水下图像中的仿真与分析
-
全方位图像的展开算法及其浏览器设计
-
OepnCV基于小波变换的水下图像去噪研究
-
OPENCV局部直方图均衡化在...
-
Solidworks遥控操作平台方位传动系统的设计
-
基于AUTODYN软件的水下爆炸数值模研究
-
水下检测与作业机器人R...
十二层带中心支撑钢结构...
中考体育项目与体育教学合理结合的研究
大众媒体对公共政策制定的影响
酸性水汽提装置总汽提塔设计+CAD图纸
乳业同业并购式全产业链...
河岸冲刷和泥沙淤积的监测国内外研究现状
杂拟谷盗体内共生菌沃尔...
电站锅炉暖风器设计任务书
当代大学生慈善意识研究+文献综述
java+mysql车辆管理系统的设计+源代码