- 上一篇:塑料制品厂总配变电所(高压配电所带-车间变电所)及高压配电系统设计
- 下一篇:Simulink双闭环晶闸管不可逆直流调速系统参数设计
(3)应用于定位系统的情况:此类别包括大部分的自动控制和工业控制,这类应用通常要完成能量的运输,所以对转矩和转速动态响应要求很高,对控制器的要求也较高。机械控制、过程控制和运输控制等很多都属于这类应用。
1.3论文选题的意义及主要工作
永磁无刷直流电机集合了无刷电机和直流电机两者的优点,随着当代电力电子器件的不断创新和永磁材料的飞速发展,永磁无刷直流电机的应用也日益广泛起来。目前人们对于无刷直流电机的研究方向主要有电机的驱动控制、电机设计、性能测试和参数优化[11]。
要想无刷直流电机在实际应用中达到效率高、可靠性高的目标,就需要对无刷直流电机各部分尺寸进行合理设计,对其工作性能进行测算,充分观察定子、转子和气隙中的电磁场分布情况,继而对电机的结构参数进行合理优化。
电机的电磁场分析通常可以使用有限差分法、边界元法和有限元法,其中最有效的是有限元法。有限元法理论基础为变分原理(广泛应用于工程领域的数值分析方法),采用有限元法对无刷直流电机进行特性分析具有重要的理论和现实意义。
本文结合永磁无刷直流电机设计原则和有限元分析理论,设计出一款30W、24V的小功率永磁无刷直流电机,通过磁路计算和Rmxprt电机性能分析确定了电机定子和转子参数,电机轴长和永磁体厚度等。接着使用Rmxprt模块下的参数分析对电机主尺寸进行了校验优化。最后通过Ansoft Maxwell 12的二维瞬态磁场分析功能对电机进行了空载瞬态磁场分析。
2.1无刷直流电机的工作原理
在永磁无刷直流电机中,电枢绕组置于定子铁心中,永磁体固定在转子上,利用转子位置传感器检测永磁磁极的位置,据此确定定子绕组的导通状态,使电机产生稳定持续的电磁转矩[12]。下面以最常见的两相导通星形三相六状态永磁无刷直流电动机为例说明其工作原理,图2.1为其工作原理图。
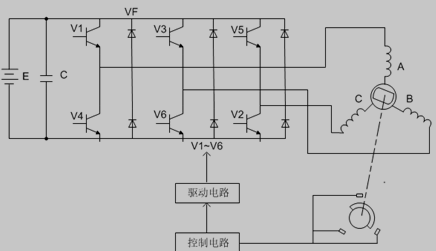
图2.1 永磁无刷直流电动机的工作原理
图2.2 定转子磁场旋转示意图
(a)a、b两相导通 (b)a、c两相导通
转子处于不同位置时转子位置传感器所做的译码不同,当这些逻辑码传给驱动电路时便会产生不一样的信号驱动电路中不同的晶闸管导通,进而导致不同桥臂导通。2.2(a)图中所示为转子开始导通时刻的状态图,此时转子位置传感器产生的信号致使驱动电路驱动晶闸管1和6导通,这时a相绕组正向导通而b相绕组反向导通,转子产生的转矩如图所示,为顺时针方向。电流流通路径为:电源正极→VT1→a相绕组→b相绕组→VT6→电源负极。2.2(b)图中所示是转子转过60°电角度的状态图,此时驱动电路驱动晶闸管1和2导通。
-
基于频率响应法的直流感...
-
AT89C51单片机直流电机转速...
-
STC89C52单片机数控直流稳压电源设计
-
交直流混合输电系统中潮...
-
MATLAB无刷直流电动机的控制方法研究
-
MSC1210单片机高精度直流表的开发与研究
-
MATLAB直流电机智能伺服控制算法研究
大众媒体对公共政策制定的影响
河岸冲刷和泥沙淤积的监测国内外研究现状
中考体育项目与体育教学合理结合的研究
酸性水汽提装置总汽提塔设计+CAD图纸
当代大学生慈善意识研究+文献综述
乳业同业并购式全产业链...
电站锅炉暖风器设计任务书
杂拟谷盗体内共生菌沃尔...
十二层带中心支撑钢结构...
java+mysql车辆管理系统的设计+源代码