4.4小结 44
5 总结和展望 45
5.1论文的研究成果总结 45
5.2展望 45
致谢 47
参考文献 48
1绪论
1.1研究背景和意义
自20世纪70年代以来,工业机器人技术这一现代科学技术代表性技术,成功的应用不但极大的提升了生产力,而且同一时间,机器人技术及其产业也表现出了蓬勃发展的情景。根据王京的全球机器人市场统计数据分析【1】可以发现, 2010年整个地球的工业机器人市场形式强劲上升,约增长27%,新安装量已经达到为76000台,在接下来的2011到2013之间,每年都将以年均约10%的速度逐年递增,年新安装量最高将可以达到100000台的数量。
生产制造中常见的几种工业机器人分别是焊接机器人、搬运机器人、喷漆机器人和装配机器人。这几种工业机器人在实践的应用极大了改善了操作工人的工作环境、减少了工人的实际劳动量、提高了车间的生产效率、促进了社会生产力的不断发展。图1-1表现了工业机器人应用在生产车间焊接工程机械结构件过程中。
焊接是工业生产制造中最重要的工艺环节之一。它在能源交通、航空航天、核工业、石油化工、机械生产制造及电子和建筑等众多行业中的应用愈加广泛。随着科学技术的发展,焊接已经从刚开始简单的连接构件技术和毛坯制造工艺发展到现在的制造行业中一项不可缺少的基础工艺和制成品的生产尺寸愈加精确的生产技术手段。传统的人力手工焊接实践生产中存在着劳动量极大、工作环境非常恶劣、焊接精度极受操作者素质心情影响、效率十分低下等多个缺点,在当今的社会生产中已经不能满足现代化技术产品对质量、产量的高要求。因此,为了在保证焊接工艺产品质量稳定性的同时,提高工艺生产率以及改善劳动条件已经成为现代焊接生产制造工艺技术发展中必须尽快解决的一个重大问题。随着电力电子技术、机器人焊接系统伺服控制系统开发设计、计算机技术、伺服驱动技术、自动控制技术的蓬勃发展,20世纪70年代的初期,焊接机器人这一卓越发明应运而生,并且成功地应用于在了各种各样的焊接场合。
焊接机器人主要有以下七个优点【2】.
1)焊接机器人稳定并且能提高焊接生产的质量,保证焊接的均匀性;
2)焊接机器人提高了劳动生产率,可以一天24小时不间断生产;
3)焊接机器人的应用改善了工人的生产劳动环境,并可以在有害环境下正常工作;
4)焊接机器人降低对工人操作技术本领的要求;
5)焊接机器人缩短了产品更新换代的准备周期,并减少了相应的硬件设备投资;
6)焊接机器人可实现小批量工艺产品的焊接自动化生产;
7)焊接机器人能在空间站中建设、能对核能设备进行文修、能到水下完成人力难以进行的生产制造焊接作业;
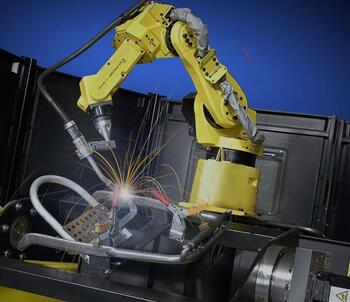
图1-1表现了工业机器人应用在生产车间焊接工程机械结构件过程中
焊接机器人从20世纪70年代的诞生和发展到现在的人人皆知,焊接机器人的历史可大致分为以下三代[3]:
基于示教并再现工作这一方式设计的焊接机器人是第一代,由于这一代焊接机器人具有操作简单便捷、不需要任何环境模型、示教时也可再次修正机械结构运动带来的些许误差等实用特点,所以在设备焊接生产制造中得到广泛的使用和好评;
基于一定传感器设备信息的离线编程类焊接机器人是第二代。得益于社会生产中焊接传感器技术以及离线编程技术的不断并行改进,这类焊接机器人现在己经进入到了生产应用研究开发的快速发展阶段; DSP机器人焊接系统的硬件系统开发(2):http://www.751com.cn/yingyu/lunwen_22536.html