
1 绪论 1
1.1 悬架系统介绍 1
1.2 主动悬架控制理论研究的目的和意义 3
1.3 国内外主动悬架研发现状 3
1.4 本论文主要研究内容 5
2 汽车悬架平顺性评价方法 6
2.1 汽车平顺性的发展概况 6
2.2 汽车平顺性评价方法 6
2.3 汽车悬架系统的评价标准 7
3 汽车主动悬架系统和路面输入的模型 9
3.1 汽车主动悬架模型建立 9
3.2 路面路谱模型建立 12
4 基于1/4主动悬架系统模型的PID控制 16
4.1 PID控制的基本原理 16
4.2 主动悬架系统的PID控制 17
4.3 PID控制器的参数整定 18
5 系统的计算机仿真结果与分析 20
5.1白噪声信号下的比较: 20
5.2. 阶跃信号下的比较: 24
5.3 正弦信号下的比较: 28
致谢 34
参考文献 35
1 绪论
1.1 悬架系统介绍
1.1.1 悬架的功能
悬架系统是现代汽车上的重要组成部分之一,是汽车的承载车身和轮胎之间的一切传递力和力矩的连接装置的总和。它的功能不仅仅是传递承载车身和轮胎之间的力和力矩,缓冲因为路面不平而引起的冲击,同时还是快速衰减因路面不平产生的车身的震动,以提供汽车行驶平顺性的保证。悬架系统主要包括:传力装置、弹簧原件和减振器三个部分,这三个部分分别起了传递力和力矩、缓冲以及减少振动的作用[1]。此外悬架系统可能也有一些特殊的功能部件,比如横向稳定器等。图1.1是悬架的结构示意图
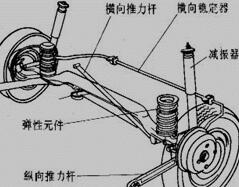
图1.1 悬架结构图
1.1.2 悬架的分类
从十八世纪751十年代,美国的特雷德韦尔取得螺旋弹簧悬架的第一个专利至今,悬架系统已经得到了长足的发展。因为悬架的结构纷繁复杂,分类的标准也不止一种。如果以导向机构为标准可以分为独立式悬架和非独立式悬架;如果以震动控制方式为标准可以分为被动悬架、主动悬架两类。而主动悬架又可以根据控制方式的不同分为半主动悬架、慢主动悬架、全主动悬架以及馈能型主动悬架。粗略地来说,不用借助外部力量的悬架被称为被动悬架;需要外界提供少量的或者全部能量来调节悬架的参数,使得悬架控制力提高的悬架称为主动悬架。图1.2是被动悬架、主动悬架和半主动悬架的简化模型。
a)被动悬架 b)主动悬架 c)半主动悬架
图1.2 三种悬架的简化模型
1-传感器 2-可调节减振器 3-执行器
被动悬架系统结构采用传统的机械结构。图1.2 a)是被动悬架的简化模型,其中包括弹簧和减振器。一个被动悬架是在1934年由Olley制作,他设计的被动悬架通过调节弹簧以及阻尼器的刚度等一系列参数来提高汽车行驶的平顺性和操作性[2]。
被动悬架的优点是结构简单,经济成本非常低而且还不需要额外的外部能量输入。被动悬架也凭借这些优点被广泛的使用,但是它也有着参数不可以改变的局限性。
AP公司根据气压悬架和液压悬架的一些特点制造了早期的主动悬架[3]。图1.2 b)是主动悬架的简化模型。传感器、控制器以及执行机构是构成主动悬架的三个部分。其中控制器是悬架系统的信息处理中心,它接收来自传感器反馈的信号,根据控制算法处理这些信息,然后将运算得出的控制方案传递给执行机构,由执行机构完成对悬架参数的调节,从而保证车辆行驶的平顺性和操作稳定性[4]。 基于PID控制的1/4车辆主动悬架的仿真研究(2):http://www.751com.cn/zidonghua/lunwen_25612.html