
第二章为柴油发动机气体-转速双环系统的建模及分析。这一章分别对柴油发动机的转速回路和气体回路进行模型的建立,讨论了两个回路的相互关系,并对模型进一步抽象成控制仿射模型,并考虑了有执行器故障存在时的气体回路模型。
第三章为柴油发动机转速回路Lyapunov控制器的设计。针对第二章建立的柴油发动机转速回路的模型,将Lyapunov稳定性原理应用到转速回路的控制器设计上,设计一个基于Lyapunov函数的控制器,并验证系统的稳定性。
第四章为柴油发动机气体回路指数滑模控制器的设计。为了提高不确定性系统的鲁棒性,考虑到系统模型的非线性与强耦合性,我们采用滑模变结构控制来设计气体回路的控制器。为了改善滑模变结构控制中普遍存在的“抖振”问题,设计了基于指数趋近律的滑模控制器。
第五章为柴油发动机气体回路扩张状态观测器的设计。由于建模的不精确性、系统一些未建模的动态以及可能出现的执行器故障,系统需要建立一个观测器将总扰动观测出来,在控制器中进行补偿。由于标准扩张状态观测器的一个主要缺点在于它们仅仅适用于积分链系统,不适合于本文所讨论的这种强耦合系统,所以本章设计了一种新颖的扩张状态观测器来跟踪观测系统中存在的总扰动。
第751章为柴油发动机双环系统的设计与仿真。这一章将转速回路和气体回路联系起来,建立起一个双环系统,利用第三~五章设计的控制器和观测器,对系统的转速和气体回路的输出变量进行跟踪,在Matlab/Simulink中验证系统响应和抗扰性是否符合要求。
最后对本文的工作进行总结和展望。
2 柴油发动机气体-转速双环系统的建模及分析
2.1 引言
针对柴油发动机气体-转速回路的双环系统,为了研究双环系统协同控制策略的设计,需要一个既能反映系统内部变量关系且结构简洁的模型。本章分别对柴油发动机的气体回路和转速回路建立了四阶简化模型。由于柴油发动机的模型是耦合非线性的,为了控制器设计的方便,需要对模型进一步抽象,写成控制仿射模型。此外为了使系统能够克服外界扰动,我们对有扰动和执行器故障存在时的系统模型进行了简要分析。
2.2 柴油发动机的气体回路模型
可变截面涡轮增压柴油发动机的原理图如图2.1所示。从原理图中我们可以看出,发动
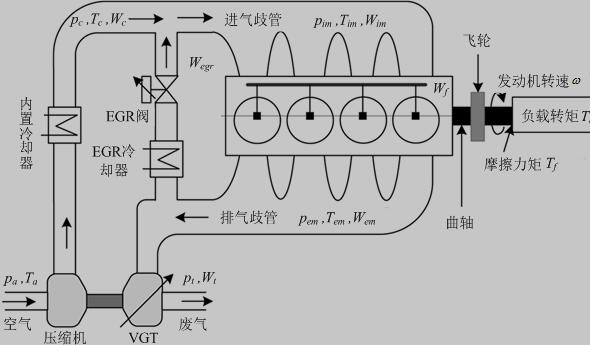
图2.1 可变截面涡轮增压柴油发动机原理图
机的空气压缩机和可变截面涡轮增压器被固定在同一个转轴上面。涡轮增压器通过将废气的能量转化成动力提供给进气歧管上的空气压缩机。与此同时,从压缩机吸入的空气和从EGR阀门通过的废气混合在一起,在发动机汽缸中与从燃油阀注入的燃油一起燃烧,将化学能转化成内能,为发动机的曲轴提供转矩。
TDE的全阶模型一共包含了七个状态[5],它们分别是:进气歧管和排气歧管的气压(pim和pem)、进气歧管和排气歧管中氧气质量分数(Fim和Fem)、涡轮机转速()、描述执行器在两个控制信号下动力学的两个状态(u1和u2)。
因为氧气质量分数很难测量,为了得到一个简单的控制律,七阶模型被简化成如下的三阶模型:
(2.1)
式(2.1)中, 和 分别指进气歧管和排气歧管中的气压, 指压缩机的功率。其中,压缩机和涡轮增压器的质量流率( 和 )与它们各自功率( 和 )之间的关系如下: 可变截面涡轮增压柴油发动机基于扰动观测器的滑模控制策略研究(3):http://www.751com.cn/zidonghua/lunwen_31332.html