
目 录
摘要 1
1 .绪论 3
1.1 课题背景与研究意义 3
1.2 国内外研究现状及发展趋势 4
1.3 课题的研究目标与内容 6
2 .移动试验平台的电控系统总体技术方案 6
2.1 课题需求 6
2.2 课题研究理论与技术分析 8
2.3 总体方案的论证与确定 11
3 .移动试验平台电控系统硬件电路的设计与实现 12
3.1 电气控制系统的组成 12
3.2 电气控制系统供配电电路设计与实现 13
3.3 电气控制系统控制电路设计 13
3.4 电气控制系统控制电路的实现 17
4. 移动试验平台电控系统软件设计 18
4.1控制程序框架设计 18
4.2 PLC控制程序设计 19
5. 总结与展望 27
5.1 研究总结 27
5.2 工作展望 27
参考文献 28
致 谢 30
基于PLC与原点感应器的运用1 . 绪论
1.1 课题背景与研究意义
本课题来源于三期学科平台建设项目。项目内容是设计一套可用于雷达移动试验的轨道及配套试验小车。
目前,探地雷达试验大多采用机载、热气球等方式[进行试验无论机载,还是热气球等方式都会由于载体的不稳定性使雷达测量数据产生较大的误差。同时,机载等方式的使用成本高,周期长都为试验带来了困扰。通过设计一套功能完备、稳定、可靠的电气控制系统,实现移动试验平台的多自由度运行。该试验平台能够在一定程度上模拟真机试验,大幅度降低试验成本与试验周期。同时该平台性能稳定、操作简便。其中电气控制系统能大幅提高实验平台的自动化程度,简化系统机械结构,保障操作安全。
本课题设计试验平台如图1所示。试验车上放置试验设备和天线,其中天线可以自动完成升降、旋转以及俯仰角变化,通过端头机房中的控制系统与试验车上车载控制面板,控制试验车在轨道上能够实现回原点的往复直线运动,从而模拟飞行器运动过程,最终实现模拟小型毫米波雷达移动试验的目的[1]。
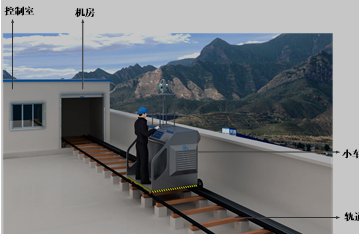
图1 试验平台整体示意图
1.2 国内外研究现状及发展趋势
1.2.1 国内外研究现状
1.3 课题的研究目标与内容
1.3.1 课题研究目标
本文的主要任务是设计一套功能完备的小型毫米波雷达移动试验台的电控系统,搭建一个稳定、可靠的移动试验平台,基于PLC实现对雷达移动平台运动和辅助功能的控制,具体实现试验数控车的回原点移动、车载升降机构的升降运动、车载旋转俯仰平台的旋转俯仰运动等自动控制功能,以及试验平台系统安全、稳定供配电、雷达试验车的运行状态监控等辅助功能。 PLC与原点感应器的运用+梯形图程序(2):http://www.751com.cn/zidonghua/lunwen_42434.html