
4.3 本章小结 34
结 论 35
致 谢 36
参考文献37
1 绪论
1.1 选题的目的与意义
电液伺服阀是现代电液控制系统中的关键部件,它能在很小的输入信号的情况下,具有很高的功率放大系数,实现输出流量和压力的双向控制。因此它广泛用于位置控制、速度控制、力控制等各个方面。
电液伺服系统从构成来说,是一种采用电液伺服阀作为电液转换和放大元件,根据液压传动原理而建立起来的自动控制系统[1]。但是电液伺服控制器中所包含的复杂的力学和运动学关系使得传统的电液位置伺服系统存在难以避免的非线性等问题,这较大程度上对系统的控制精度造成了影响,因此推进研究电液伺服系统中的现代控制方法,对我国工业的发展具有十分重要而长远的意义。
1.2 液压伺服系统简介
电液伺服系统包含了多个功能部分。其组成如图1.1所示[2]。
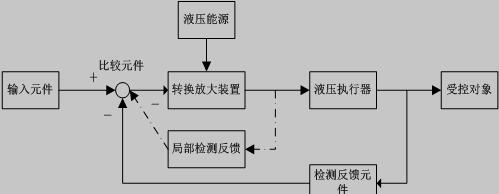
图1.1 液压控制系统的组成
系统各部分结构的作用为:
输入元件:将输入指令加载与系统的输入端口;
转换放大装置:将电信号转换为液压信号,同时进行信号的放大;
执行元件:能够在加载的信号下进行运动或力的输出,驱动受控对象,实现系统运动执行;
受控对象:机器设备或负载等;
检测反馈元件:测量检测系统的输出信号并对其进行反馈输入到反馈点,是系统构成闭环的主要元件;
液压能源:提供动力,驱动系统运行的具有一定压力的流体动力源[3]。
1.3 控制放大器
控制放大器主要作用是将未进入伺服阀线圈工作输入信号进行处理。
控制放大器一般涵盖:电源变换电路;输入信号发生电路;信号处理电路;颤振信号发生电路;前置电压放大电路;功率放大电路等。如图1.2所示。
控制放大器构成
控制放大器是本次课题中研究中的关键点,因为伺服控制系统的精度和稳定性在很大程度上是又控制放大器控制的。本文将依据典型的放大器对电液伺服阀的前置放大电路、功率放大电路、限幅电路、震颤电路等进行设计计算及仿真分析。
1.4 电液位置伺服系统的控制方法和研究现状
阀的工作状况在可以被简化成数学模型,对这个数学模型进行分析可以近似认为对阀实体进行分析,这种对数学模型进行分析替代直接分析实物是现代液压系统研究的主要方法。在有着的强大的分析仿真功能的计算机的广泛应用背景下,许多复杂的建模、运算等问题获得了便捷有效的解答。在这基础上运用PID、模糊控制等先进控制策略来改善和提高系统的线性度和精度已成为电液伺服阀控制研究的重要方式。
现代的液压伺服控制技术已经可以将机械技术、控制技术、微电子技术等综合加入液压技术,形成各类型号不一的新型的电液伺服阀产品。随着电子、计算机等领域的发展,电液伺服技术的研究将迎来更大的进步。
1.5 本文主要研究内容和要求
根据毕业设计任务书的相关参数要求,对比实际应用的伺服阀,将本次毕业设计采用的电液伺服阀选定为航空工业第六〇九研究所的 伺服阀。根据模拟电路的相关知识对电液伺服阀控制电路进行了设计,并应用电路设计软件Multisim对所设计的电路进行仿真分析,分析电路的性能。此外对电液位置伺服系统进行分析,并建立了系统的数学模型。简化系统的传递函数,应用数学软件Matlab中Simulink模块对本文建立的系统进行了仿真分析。最后得出对整体系统的稳定性、准确性及快速响应性的评价。具体内容和要求说明如下: MATLAB伺服阀驱动电路的设计控制仿真(2):http://www.751com.cn/zidonghua/lunwen_46259.html