- 上一篇:中等流量液压试验台机械装置设计+CAD图纸
- 下一篇:电磁夹具设计+CAD图纸+ANSYS仿真
世界著名的公司开始研制移动机器人平台,这些移动机器人主要作为大学实验室及研究机构的移动机器人实验平台,从而促进了移动机器人学多种研究方向的出现。90年代以来,以研制高水平的环境信息传感器和信息处理技术高适应性的移动机器人控制技术,真实环境下的规划技术为标志,开展了移动机器人更高层次的研究。
上个世纪60年代, 由于机器人和计算机技术的发展, 人们开始研究具有视觉功能的机器人。但在这些研究中, 机器人的视觉与机器人的动作, 严格上讲是开环的。机器人的视觉系统通过图像处理, 得到目标位姿, 然后根据目标位姿, 计算出机器运动的位姿, 在整个过程中, 视觉系统一次性地“ 提供” 信息, 然后就不参与过程了。在1973年, 有人将视觉系统应用于机器人控制系统, 在这一时期把这一过程称作视觉反馈(visualfeedback)。直到1979年, Hill和Park提出了“ 视觉伺服”(visual servo) 概念。很明显, 视觉反馈的含义只是从视觉信息中提取反馈信号, 而视觉伺服则是包括了从视觉信号处理, 到机器人控制的全过程, 所以视觉伺服比视觉反馈能更全面地反映机器人视觉和控制的有关研究内容。
上个世纪80年代以来, 随着计算机技术和摄像设备的发展, 机器人视觉伺服系的技术问题吸引了众多研究人员的注意。在过去的几年里, 机器人视觉伺服无论是在理论上还是在应用方面都取得了很大进展。在许多学术会议上, 视觉伺服技术经常列为会议的一个专题。视觉伺服已逐渐发展为跨机器人、自动控制和图像处理等技术领域的一门独立技术。
1 设计方案
1.1 设计内容
因为是要进行比较精密的抓取物体,所以采用单片机控制实现对机器车的控制。通过步进电机,驱动轮子来实现小车的前进、后退与转向。而在小车的上面则是抓物机械手的部件。要实现机械手的上下移动还有一定范围的转动,还有手指的自由张合。
1.2 设计任务
转弯半径:不小于1米 运动速度:不大于10米/分钟
目标尺寸:50*50~100*100mm 目标质量:不大于2kg
目标提升距离:200mm
1.3 方案的选择
由于小车的移动都要很精确,所以只考虑了步进电机和伺服电机。步进电机的速率是由驱动器信号输入的脉冲数量和频率来控制的。但不适合在长时间和同方向的场合使用,这样容易烧坏电机。而伺服电机与步进电机相比,在控制方式上很相似都是用脉冲串和方向信号,但价格相对来说较高。在性能满足的情况下,考虑经济方面,我们采用了步进电机。
对于机械手的上下移动,可以想到的有液压、气动还有丝杆。考虑液压和气动都比较的便宜,但考虑到精确度,采用丝杆传动了。因此我们采用了步进电机带动丝杆转动,控制手爪的张开闭合。
2 机械手的设计
由于机器人抓取的目标物体的体积和重量不是很大,设小车的尺寸为400*200*100mm,抓取的物体最重为2KG。
2.1 抓手结构的设计
设抓盘的直径为50mm,爪子的开口角度为120度,抓爪可转动30度。采用的是四杆机构来实现爪子的自由张合。结构如图所示:
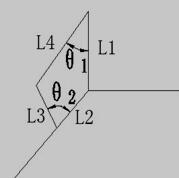
图2-1 四杆结构简图
其中L1是连杆盘与抓盘的距离,L2是爪子上两个圆柱销之间的距离,L3是连杆与爪子的距离,L4是连杆。
如图,L2、L3、L4 为定长,而L1 随着连杆盘的移动而改变,当连杆盘向上移动时,L1会变大,那时,连杆L4通过L3拉着L2向上转动,那时爪子张开:相反,当连杆盘向下移动时,连杆会压爪子向下转动,即爪子会抓紧物体。
-
汽车后桥横臂式悬挂系统设计+CAD图纸
-
带式转载机设计+CAD图纸
-
两关节地面移动机器人控...
-
Solidworks95式步枪智能化导轨设计
-
ADAMS/Car轮毂电机驱动大学...
-
CATIA小型履带式机器人底盘...
-
Pro/E房车手刹双棘轮式机构设计及分析
电站锅炉暖风器设计任务书
酸性水汽提装置总汽提塔设计+CAD图纸
十二层带中心支撑钢结构...
中考体育项目与体育教学合理结合的研究
杂拟谷盗体内共生菌沃尔...
大众媒体对公共政策制定的影响
java+mysql车辆管理系统的设计+源代码
河岸冲刷和泥沙淤积的监测国内外研究现状
当代大学生慈善意识研究+文献综述
乳业同业并购式全产业链...