- 上一篇:谐振梁加速度计大量程非线性理论与试验技术研究
- 下一篇:自动焊锡系统的设计自动焊锡机器人的机械结构设计
1.1 研究背景及意义
在非结构环境下,弹跳机器人因其良好的越障性能,得到了国内外学者的重视。连续式弹跳机器人和间歇式弹跳机器人是现在弹跳机器人的两个主要研究方向。连续式弹跳机器人【1-2】主要研究了稳定性及控制方面,而间歇式弹跳机器人【3-6】则偏重于研究机器人的机构设计,跳跃性能,驱动方式及功能实等方面。在复杂地形的环境下,间歇式弹跳机器人比连续式弹跳机器人更具优势。下面针对间歇式弹跳机器人进行深入探讨。文献综述
迄今为止,实现储能、弹跳及复位翻转等方面是目前研究间歇式弹跳机器人的主要研究问题。BURDICK 等人【7】先后共研制了三代间歇式弹跳机器人。第一代为利用丝杠弹簧作为储能单元的球形机器人。利用了锁定—释放机构作为控制机构控制弹簧储能并跳跃。通过球体结构的外部结构在机器人落地后实现自行复位。第二代为用对称齿轮—六杆机构进行储能的仿蛙式弹跳机器人。对称齿轮—六杆机构可使储能弹簧的线性力转化为起跳方向上的非线性力,不会出现提前起跳的情况,并且有较高的能量利用率。倒地后利用太阳能电池板进行翻转复位。第三代为轮腿式机器人较仿蛙式机器人增加了起跳角度调整机构,但却没设计翻转复位机构。综合这三代机器人来看,弹簧储能的大小不能调整是这系列机器人的硬伤。KOVAČ 等人【8】研制了一种球笼形间歇式弹跳机器人,用凸轮控制四杆弹跳机构,使铰轴处的扭簧储存或释放能量。球笼形结构可减小机器人落地时的冲击,还可以帮助其恢复初始位置。该机器人拥有较轻的质量,但跳跃性能却非常有益。同样,该机器人也未能控制储能的大小。也不能自行调整起跳角度。ZHAO 等【9】利用齿轮收卷绳索来改变齿轮—五杆弹跳机构的形变。实现了用机构中的弹簧来进行储能的设想。并通过控制缺齿齿轮的转动,使弹簧所储存的能量得到释放。该机器人储能大小可调,但未能解决及起跳角度的调整和倒地后翻转复位等问题。TSUKAGOSHI 等【6】研制的气动轮腿式弹跳机器人的车轮外侧半球形结构可以大大降低机器人落地后因为重心发生偏移所导致侧翻的可能性,但其也没有讨论气压大小和调整起跳方向的问题。除此之外,其他研究工作【10-11】同样没有针对这一系列问题做出深入的研究。
由于不能调整起跳角度和储能大小,使得之前一系列弹跳机器人的运动轨迹过于单调,不能进行有效的控制,不能适应复杂的地形。为此,柴辉等【12】基于齿轮—五杆仿生弹跳机构,设计了一种。这种新型的机构可以改变弹簧储能的大小和机器人起跳时的角度。将这种齿轮—六杆变胞机构安装在已拥有翻转机构的机器人上就可以使机器人在倒地后自行复位。通过对机器人的弹跳力、起跳角度以及复位等性能的分析和验证,证明了间歇式弹跳机器人跳跃轨迹的可控性。
1.2 六杆储能机器人主要结构研究现状
1.2.1 总体结构
图1.1、图1.2为目前常见的一种间歇式弹跳机器人整体装配结构模型。该机器人主要是由主电动机驱动的齿轮—六杆机构、舵机控制棘轮机构及复位电动机驱动的翻转机构部分组成。
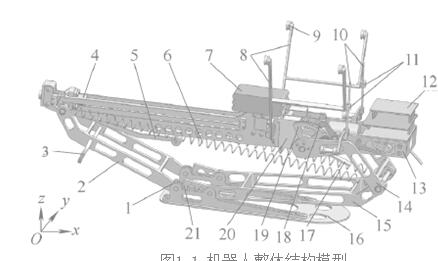
图1.1 机器人整体结构模型
图1.2 机身杆1结构模型
1, 21. 扇形齿轮 2. 支撑杆 3. 后端防撞杆 4. 螺母 5. 推杆
6. 储能弹簧 7. 电源 8. 翻转杆 9. 滚子 10. 导杆 11. 滑块
12. 控制器 13. 机身杆 14. 大腿杆 15. 小腿杆 16. 脚杆
-
滚动功能部件可靠性建模与分析
-
多功能水冰两栖艇的概念设计+CAD图纸
-
海葵式多功能真空吸盘设计与研究
-
具有可重构行走机构小型...
-
ADAMS+SolidWorks专用多功能钻...
-
Solidworks具有有载同步脱钩...
-
SolidWorks摩托车减震器多功...
中考体育项目与体育教学合理结合的研究
java+mysql车辆管理系统的设计+源代码
乳业同业并购式全产业链...
河岸冲刷和泥沙淤积的监测国内外研究现状
酸性水汽提装置总汽提塔设计+CAD图纸
杂拟谷盗体内共生菌沃尔...
大众媒体对公共政策制定的影响
当代大学生慈善意识研究+文献综述
十二层带中心支撑钢结构...
电站锅炉暖风器设计任务书