- 上一篇:能量收集和储能技术发展研究现状
- 下一篇:国内外交通安全现状
目前,国外自动驾驶机器人的研究发展大致可分为三个阶段[4]:(1)汽车底盘测功机台架试验用机器人。用于代替人员在测功机上进行各种车速情况的模拟实验测试,获取汽车排放、加减速、耐久性等方面的数据。该类机器人的研究主要围绕汽车性能自学习和速度控制展开研究,在理论和应用上都取得了很多成果。60928
(2)用于道路耐久性试验的驾驶机器人。该类机器人主要是在汽车底盘测功机试验用机器人的基础上增加了对汽车方向盘的运动控制功能。从而在结构化试验场道路上进行汽车耐久性试验。
(3)自主驾驶机器人:该机器人以汽车为运动的载体,将整个汽车作为机器人,又称之为智能车辆,这是目前国外各大公司和高校研究机构竞相研发的热点。特别是在美国国防高级研究计划局(DARPA)大力推动下,自主驾驶机器人的研究取得了突破性进展。
国内于二十世纪九十年代中期开始汽车驾驶机器人的研究工作,起步相对较晚,但已经取得很大进展[5]。目前主要有东南大学研制的用于汽车性能试验的(DNC-1型)气动式驾驶机器人和用于汽车排放耐久性试验的(DNC-2型)气电混合式驾驶机器人,填补了国内空白,全电动式(DNC-3型)驾驶机器人当前正在开发中。其中,DNC-1型驾驶机器人为国内首台汽车驾驶机器人,于1995年荣获机械部科技进步三等奖;DNC-2型驾驶机器人于2004年荣获中国汽车工业科技进步二等奖和南京市科技进步二等奖。
图1.1和图1.2分别为DNC-1型与DNC-2驾驶机器人。
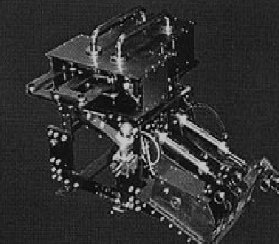
图1.1 DNC-2型驾驶机器人
其它成果方面,张为公,陈晓冰根据驾驶动作的要求讨论汽车驾驶机器人执行机构及传感器检测和驱动控制系统,论文网对驾驶机器人多层控制模型进行研究,并分析了自学习和自补偿算法、车速预瞄跟踪控制方法、试验数据管理和远程监控等关键技术的基本思想。陈晓冰研究了利用驾驶机器人代替人类实验员在室内的道路试验的室内模拟原理和方法[6]。吴刚,在车辆驾驶机械手的研制与伺服运动控制研究中,根据自动换档试验装置的实际需要,设计了试验装置的机械传动系统,并对机械传动系统运动的伺服控制进行了研究[7]。褚金钱,黄澈,李国兴,牛志刚,董志国提出了一种对变速杆操纵的机械手设计方法,以实现各种换挡动作[8]。程立深入研究了直流永磁电动机的唯一和频率控制方法,使得电机的精确定位以及往复运动得以实现[9]。