
4.2 空间直线插补仿真实验 34
4.3 空间圆弧插补算法 36
4.4 空间圆弧插补仿真实验 39
4.5 本章小结 40
第五章 总结与展望 41
参考文献 42
致谢 43
第一章 绪论
1.1 机器人定义
国际标准化组织对机器人的定义为:机器人的动作机构具有与人类或者其他生物体某些器官相似的(如肢体、感官)等功能,机器人的工作种类多样,动作程序灵活多变。机器人具有不同程度的智能性,如感知、记忆、学习、推理等。机器人还具有独立性,完整的机器人系统可以在工作生产中不依赖人类或其他生物的基本干涉。
本文的研究对象是指在运用中可以进行自动控制、多自由度、可重复编程的、具有多种功能和多种用途的操作机,我们称之为机械臂。它能完成搬运物体、装载货物等各种任务,下图是典型的机械臂系统框图。机械臂具有类似于人类手臂的基本功能,可操作其他装置。
目前大多数机械臂只能在某一固定的位置上进行操控,这个固定的位置称为基座。所以其只能在固定的重复性的工作中应用。因此,在实际生产中需要一种能在比较大的空间或者复杂的环境中完成任务并且能够移动的机器人。由于这种机器人能在较大的工作范围内灵活运动,对它们的研究也越来越多,但是这种机器人很多都只是可以移动,但没有手臂来实现抓取物件的功能。所以在移动机器人上安装两只轻型服务型机械臂,使其能够完成简单的工作是非常必要的。
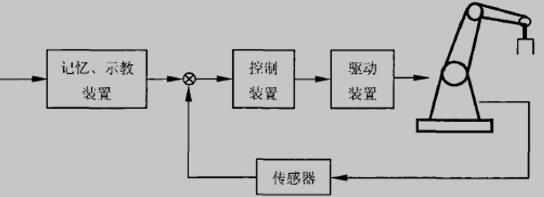
图1.1 典型机械臂系统
Fig.1.1 Typical mechanical arm system
1.2 机器人的应用
在很多工厂和国家企业中,由于作业环境的恶劣或特殊,机器人被用来代替工人完成各类危险、简单、重复性的工作。这样一来既能保证工作的进度,又能保证人员的安全,下面例举几类机器人的应用:
机器人焊接 机器人拉物机器人抓物 机器人装配汽车
图1.2 机械人的应用
Fig.1.2 Robot Applications
1.3 课题研究的目的和意义
在科学技术飞速发展的今天,传统的加工方法和操作方式被先进的制造技术所替代。机器人技术也随着现代工业的要求而蓬勃发展:比如自动生产线,实行无人化的工作车间等。九十年代之后,工业机器人的精度、速度、可靠性等也朝着准、快、高的方向发展。不同种类的机器人不断被应用于各种各样的领域中;性能越来越好的各类机器人,逐步向智能化方向发展是两个机器人技术发展的两个最为突出的特点。21世纪机器人技术作为科学技术发展的一个热点。生产力和社会经济的发展产生也必将受机器人进一步发展的影响。机器人将成为包括电子、机械、控制、计算机、仿生学、传感器、和人工智能等多个学科理论与技术在内的机电一体化机器。在未来的一个世纪中科学与技术的发展将会令机器人技术提高到一个更高的水平。机器人必将更加积极和广泛的应用到到人类的生活生产产中,成为我们人类不可或缺的一员。
现代机器人有一个重要的组成部分,即:多自由度机械臂。其技术的发展也随着科技的发展不断进步。相对于普通的机械臂功能的单一和简单的操作,多自由度机械臂功能的多样和人性化的操控,在很多工程技术和工程实际中能够发挥的更加出色。
1.3.1 理论意义 751自由度串联机械臂是一种安装在工作台上,由751个关节组成的机械臂。这种结构使得机械臂能够在移动的同时,还具备操作能力,这就使它比普通的移动机器人和传统意义上的机械臂更强大,能完成的工作也较多;但是由于这个特点,这种机械臂在应用时具有优势的同时,也存在诸多难点,比如工作台和机械臂的动力学特性不同,在轨迹规划时其控制方法,路径的规划、逆解的优化和解决的方式等。这恰巧也是751自由度串联机械臂的研究的意义所在。 D-H建模机器人手臂轨迹规划与仿真研究(2):http://www.751com.cn/zidonghua/lunwen_33250.html