- 上一篇:solidworks镁合金三棱盒拉深成形有限元分析与工艺研究
- 下一篇:MATLAB武装机器人稳定平台随动控制设计
1.4本课题研究内容
本课题主要是对换挡机械手的结构进行的设计和分析,设计方面主要是首先通过分析换挡机械手所要完成的功能以及完成该换挡功能的原理,从而对换档机械手的整体方案进行设计。该换挡机械手所要完成的功能是可以在不同车型上安装,并且换档时操纵杆球头可以行走出“王”字型轨迹,在换挡和挂挡方向的最大行程都不超过200mm,并且选档时运动轨迹在挂挡方向的偏差不超过2mm,同样的挂挡时运动轨迹在选挡方向的偏差不超过2mm。基于这些要求,完成了换挡机械手的方案设计和结构设计,相关机械手的尺寸通过汽车设计手册查得,并进行一部分计算,得出所有杆件尺寸。
此外,设计了机械手的结构之后,根据其力学要求:选档挂挡最大输出力都为200N。对机械手零部件的强度进行了校核,并选取了适合的材料。然后就是机械手的建模过程,通过Pro/E软件建立机械手的三文实体模型,并用CAD作出工程图。
建立好了换挡机械手的三文实体模型后,将其导入Solid works进行有限元应力分析,具体过程包括:新建静力算例、对模型定义材料、添加约束、添加外部载荷、生成网格、运行算例、得出结果并进行分析。从而得出危险点的最大应力,并与材料的强度进行比较,看是否符合要求。进行了有限元应力分析之后,依然是在Solid works中对机械手进行模态分析,具体过程和有限元分析相似:新建频率算例、定义材料、划分网格、运行算例、得出结果并列出共振频率和振型,最后对结果进行频率分析。
第2章 换挡机械手整体方案设计
2.1换挡机械手结构分析
由于受汽车换挡操纵机构的约束,换挡操纵杆只能沿着特定的轨迹运动,其中最为常见的是沿着“王”字形轨迹运动,如图2.1所示。
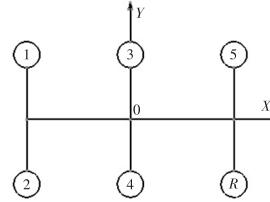
图2.1档位分布图
换挡机械手是在不改造试验车辆的基础上代替人工,按照预先设定的各种换挡工况来进行汽车试验,完成汽车换挡动作的一种机械。换挡机械手的运动过程包括挂档运动方向(Y方向)和选挡运动(X方向)。
初期的换挡机械手主要由挂挡部分和选档部分组成,挂挡部分主要机构如图2.2所示。当进行挂挡动作时,由挂挡电机输出运动通过齿轮传递给螺纹推杆,进而推动滑座及固连在滑座上的选挡部分做直线运动,从而进行挂挡动作,在这过程中选挡部分只随着滑座做直线运动,其选挡电机不输出运动。
图2.2机械手挂挡部分机构
选挡部分主要机构如图2.3所示。选挡部分全部都固定在滑座上随着滑座运动,进行挂挡动作时,挂挡电机不输出运动,选挡电机输出转动,再由选挡齿轮把运动传递给连杆,通过连杆推动末端滑块在X-Y平面内滑动,由于此时连杆不能作Y方向运动,因而滑块只能在X方向运动。
-
UG某型汽车零件结构刚度分析
-
汽车后桥横臂式悬挂系统设计+CAD图纸
-
发动机润滑油对汽车NVH性能的影响研究
-
UG汽车遥控器下壳注塑模具设计+CAD图纸
-
solidworks陶鲁斯pt24/7纯双动...
-
Pro/E轿车车门自动开关系统设计
-
XY工作平台电路接插件质量...
中考体育项目与体育教学合理结合的研究
杂拟谷盗体内共生菌沃尔...
河岸冲刷和泥沙淤积的监测国内外研究现状
当代大学生慈善意识研究+文献综述
java+mysql车辆管理系统的设计+源代码
乳业同业并购式全产业链...
大众媒体对公共政策制定的影响
十二层带中心支撑钢结构...
酸性水汽提装置总汽提塔设计+CAD图纸
电站锅炉暖风器设计任务书