- 上一篇:4105四冲程柴油机活塞组设计+CAD图纸
- 下一篇:CPLD+LF441火箭炮炮口压力场高速测试方法研究
进入21世纪以来,军事变革不断深化,以无人机、无人车为典型的无人化作战平台开始在战争舞台上大显身手。为了降低士兵在危险的战场环境中的危险,军用机器人不断出现[2]。诱饵机器人可通过制造假象迷惑敌方;侦查机器人可以代替士兵深入危险区域进行侦查,实时传回第一线的战场信息;无人车可以源源不断将作战物资输送到位;排雷机器人可以代替士兵检查和清楚可疑爆炸物;无人机可以全天候、低成本进行侦查工作并出其不意地发动进攻[3]、[4]……机器人在未来的战场上势必会发挥巨大的作用。
同时,由于真实的战场情况复杂多变,单个机器人很无法像实验室的理想情况一样执行任务,这时就需要多机器人并行协同。多机器人作战体系具有空间性分布特点,可以并行完成多个任务;具有资源的冗余性和功能的互补性,增加了系统的抗干扰性和鲁棒性;可以进行数据互传,扩大了执行任务的范围和能力。总体上说,多机器人作战体系相比单个机器人具有数量、协同、情报、速度等方面的优势,因此该领域日益成为军事机器人研究的重点[5]。
1.2 多移动机器人体系发展现状
1.3 多作战机器人体系发展趋势
1.4 本课题研究目的与内容
本课题设计了一种通过基于无线网络控制、由三台轮式小型机器人组成的多机器人系统,在设计过程中将会对以下几个主要方向进行讨论。
(1) 作战编队协同与协同控制实现
首先,模仿自然界中蚁群利用信息素引导协同移动的行为,对节点机器人的运动模型进行数学分析,提出一种基于航标示踪法实现多移动机器人编队动态维持的策略。
(2) 机器人模块组件与实现
根据多移动机器人运动方案,选择单体机器人所需的硬件和确定其结构,并设计多机器人体系运动决策逻辑。
(3) 无线通信网络设计
选择了机器人无线通信硬件模块和通信协议,搭建了由上位机、下位机领航者机器人、下位机跟随者机器人组成的分层式控制网络,设计和实现了基于无线信息交互的多机器人体系通讯。
(4) 机器人的控制系统设计
机器人中机电高度一体化,多机器人群的运动通过上位机、下位机协调控制并由机械结构执行。阐述了机器人体系的硬件系统和软件程序两部分,重点讲述了下位机中领航者、跟随者机器人分别的任务分解步骤和上位机的控制流程。
(5) 基础实验
搭建了多机器体系的实体并初步调试了上位机程序,在下位机中烧录编写好的控制程序,对不同传感器进行了实现和调试,验证该控制系统是否可行。
2 作战编队与协同控制策略
2.1 数学模型分析
本文采取了GPS卫星定位和HMC5883电子罗盘组合的方式进行定位,故可以利用卫星定位信息确定每个机器人节点在以地球为背景的坐标系中的位置(xi,yi),同时根据HMC5883电子罗盘的反馈数值确定节点机器人当前运动方向的方位角θ。
分析单个机器人时,若将机器人本体视为刚体,该机器人在平面内的运动包含两种运动形式,即平面运动和转动。如图1.1所示,在理想模型中,选机器人几何中心P点作为运动基点,则机器人在平面内的运动可以分为广义坐标系中该基点的平动和机器人坐标系绕该基点的转动。
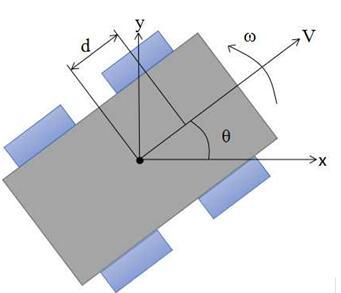
图1.1 机器人单体运动模型
对其运动学状态的数学归纳式为:
在上式分析得到,可控变量为(Vt,ωt)。
-
发动机润滑油对汽车NVH性能的影响研究
-
单体液压支柱密封质量检测仪的设计+CAD图纸
-
QCS014液压实验台的改造+CAD图纸+程序
-
MATLAB某反后坐装置的优化设计
-
CAN总线引信装定数据多协...
-
满足国际公约的炮射通用...
-
基于示功图的自由活塞发动机燃烧过程分析
酸性水汽提装置总汽提塔设计+CAD图纸
杂拟谷盗体内共生菌沃尔...
大众媒体对公共政策制定的影响
电站锅炉暖风器设计任务书
十二层带中心支撑钢结构...
河岸冲刷和泥沙淤积的监测国内外研究现状
乳业同业并购式全产业链...
中考体育项目与体育教学合理结合的研究
java+mysql车辆管理系统的设计+源代码
当代大学生慈善意识研究+文献综述