- 上一篇:沙箱成型机液压系统设计+CAD图纸
- 下一篇:液压测试台自动装夹系统设计+CAD图纸
本论文研究的6-UPS钢带并联平台与目前常见的支撑杆型并联平台不尽相同。其工作原理是通过伺服电机和皮带轮的转动带动卷筒,卷筒再带动钢带运动并使得钢带长度发生变化,从而实现动平台的多自由度运动。
电机座铰接在横杆上并可以绕绞轴转动,钢带的一端可以绕卷筒转动,这两个转动方向正交,其作用等价于虎克绞;钢带的另一端通过复合球绞与动平台连接,所以该并联机器人机构可以简化为下图1.1的结构形式,与上下平台连接的每条单开链,自上而下包括一个U副,一个P副和一个S副。
在平衡状态下,它的动平台与水平面成45°。动平台在空间上具有六自由度,在平衡状态下,动平台在XY方向各有±200mm的运动范围,±45°的旋转范围。图1-1为其在静止情况下的状态。
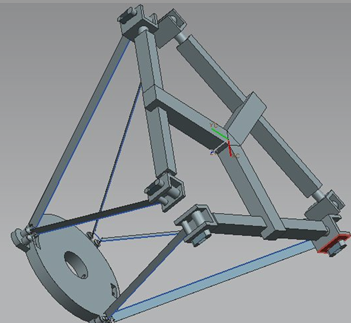
图1-1 6-UPS钢带并联平台三维结构图
不过在动平台的运动过程中,支撑钢带的受力不是总是沿着钢带的支撑方向,在下平台近于竖直的时候,重力与支撑钢带之间的夹角将近有90°的夹角,易使支撑钢带变形,影响并联机器人的精度和使用寿命,所以需要设计重力平衡机构,对下平台(动平台)上的载荷进行平衡,以改善支撑钢带的受力状况。
同时,由于动平台能够在空间作自由运动,平衡机构需要能自动定位重心,从而使向上的牵引平衡力与重力的作用线共线,这便是本文的研究重点之一:重心动态寻找机构的设计。
1.3 重力平衡机构概述
1.3.1常用的重力平衡法
常用的重力平衡法有3种:气压、液压平衡[19];制动器锁紧;重物配重平衡。
(1)气压、液压平衡
气压平衡方法就是在部件重力G的反方向施加一个与其大小相等的气压力F,来抵消该重力的作用 。液压平衡与气压平衡的工作原理基本是一致的,区别在于所产生力的介质不同。
理论上采用液压平衡的方法,只要各元器件选择适当,其运动部件的速度、加速度都能达到较大的值。但是,当运动部件的速度、加速度较大时,往往会出现驱动过载、液压冲击、振动等问题。
而采用气压平衡的方法可以使运动部件达到理想的速度和加速度,但是气压平衡机构的体积较大,而且噪声也不容忽视。
(2)制动器锁紧平衡
制动器锁紧平衡法是利用摩擦力来平衡运动部件重力的一种方法。当运动部件工作时源`自*751~文·论^文`网[www.751com.cn,锁紧机构是不起作用的,只有运动部件停止时,锁紧机构的摩擦力才起到平衡的作用。此方法在国外的高速加工中心得到广泛应用。
不过,此方法存在一个最大的缺点:制动器的响应必须具有很高的灵敏度,否则对移动部件的定位精度会产生较大影响。同时还必须安装紧急制动机构来应付加工过程中突然断电等事故的发生。
(3)重物配重平衡
重物配重平衡的原理相对简单,就是按运动部件的重量配以相同重量的平衡块。重物配重平衡的结构简单且工作可靠。但是,缺点在于重物配重平衡需要占用较大的安装空间。
1.3.2 重力平衡法实例详解
对于本文中所研究的PM,其平衡方法主要可以考虑气压、液压平衡法和重物配重平衡法。下面列举了现实中经典的几个重力平衡机构。