- 上一篇:ardunio单片机分布式数据采集模块设计+源程序
- 下一篇:基于主元分析的故障检测技术
2.7 颤振信号发生电路的设计与仿真 16
2.7.1 颤振信号发生电路的设计 16
2.7.2 颤振信号发生电路的仿真 18
2.8 整体电路的仿真与分析 18
2.9 本章小结 21
3 电液位置伺服系统的数学建模与仿真分析 22
3.1 电液位置伺服系统的分析方法 22
3.2 电液位置伺服系统的组成结构 22
3.3 电液位置伺服系统的数学模型 22
3.4 基于Matlab的系统的性能分析 24
3.4.1 系统的频域特性分析 24
3.4.2 系统的时域特性分析 25
3.5 本章小结 26
4 电液位置伺服系统的PID控制 28
4.1 PID控制的基本原理 28
4.2 PID控制器的参数整定 28
4.3 本章小结 32
结 论 33
致 谢 34
参 考 文 献 35
附录 电液伺服阀控制电路图 36
1 绪论
1.1 选题的目的与意义
液压伺服控制由于具有响应快、精度高等特点而为人们所重视[1]。电液伺服控制系统一不仅有电气的优点,而且包含了液压的特长[2]。电液伺服阀动态响应快、可靠性高,现已普遍应用于电液伺服控制系统中[3]。
但电液伺服控制器中所包含的复杂的力学和运动学关系使得传统的电液位置伺服系统存在难以避免的非线性等问题,这较大程度上对系统的控制精度造成了影响,因此推进研究电液伺服系统中的现代控制方法,对我国工业的发展具有重要意义[4]。
1.2 液压伺服系统简介
电液伺服系统包含了多个功能部分。其组成如图1.1所示[5]。
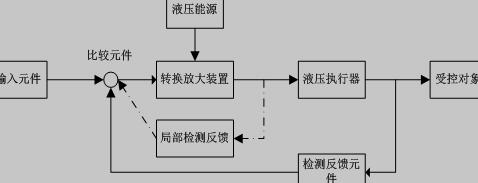
图1.1 液压控制系统的组成
系统各部分结构的作用为:
输入元件:加给输入端以输入信号;
转换放大装置:放大并转换信号;
执行元件:驱动受控对象;
受控对象:系统控制的机器设备或负载;
检测反馈元件:检测输出信号,产生反馈;
液压能源:提供动力源。
系统中各个组成部分之间相互协作,共同构成整个系统,保证系统能够稳定准确地工作。
1.3 控制放大器
控制放大器可以对微弱的输入信号进行前处理。
控制放大器的通常包括:电源变换电路;输入信号发生电路;信号处理电路;颤振信号发生电路;测量放大电路;功率放大电路等。如图1.2所示。
图1.2 控制放大器构成
控制放大器是电液伺服系统中至关重要的组成部分,它直接决定着系统能否正常工作。本文将根据放大器的典型构成对电液伺服阀的控制电路进行设计。
1.4 电液位置伺服系统的控制方法和研究现状
1.5 本文主要研究内容
本文根据毕业设计任务书的相关要求将电液伺服阀选定为航空工业第751〇九研究所的 伺服阀。根据模拟电路的相关知识对电液伺服阀控制电路进行了设计,并应用电路设计软件Altium Designer对所设计的电路进行仿真分析,评价电路的性能。此外通过查阅资料对电液位置伺服系统进行了分析。在此基础之上建立了系统的数学模型。随后对系统的传递函数进行了分析。然后应用数学软件Matlab对本文建立的系统进行了仿真分析。最后在数学软件的Simulink模块中建立了电液位置伺服系统模型,采用PID控制参数整定的方法对系统的控制性能进行了优化。
-
方舱扩展液压电液控制系统设计
-
PLC拖线阵拖曳绞车电液控...
-
PLC生产线动力头电液控制系统设计+梯形图
-
PLC海洋平台波浪补偿吊机...
-
机动式方舱舱顶升降电液控制系统设计
-
MATLAB平台自动调平电液控...
-
生产线动力头电液控制系统设计+PLC梯形图
当代大学生慈善意识研究+文献综述
中考体育项目与体育教学合理结合的研究
java+mysql车辆管理系统的设计+源代码
乳业同业并购式全产业链...
十二层带中心支撑钢结构...
河岸冲刷和泥沙淤积的监测国内外研究现状
电站锅炉暖风器设计任务书
大众媒体对公共政策制定的影响
酸性水汽提装置总汽提塔设计+CAD图纸
杂拟谷盗体内共生菌沃尔...