- 上一篇:MATLAB倾斜平台火控解算方法的研究
- 下一篇:DDE技术MATLAB与组态软件的变电站仿真系统开发
早期运动控制系统主要是与运动控制技术、数控技术、机器人和工厂自动化技术的发展而发展的。早期运动控制器实际上可以独立运行一个专用的控制器,不需要额外的处理器和操作系统支持,可以独立完成运动控制功能,互动功能所需要的技术和其他功能。运动控制器,这种控制器可以独立运行。
对于电气运动控制系统,从不同的角度详细分类:
1)按控制系统的结构分:单环控制系统、双环控制系统及多环控制系统;
2)按所驱动电机的供电类型分:直流传动系统、交流传动系统;
3)按所设计控制器的类型分:模拟控制器、数字控制器[2]。
从基本结构上来看,大部分的运动控制系统主要由以下三部分组成:控制器,功率驱动单元和控制对象,闭环控制系统还包括检测和传输设备。对于一般的自动控制系统,它控制的想法是非常相似:将被控量与给定值相比较,获得一个错误的信号,然后直接用于控制系统的错误,误差趋近于零,以实现被控量往往设定点控制的目的。这是一个系统的输出来完成的反馈量。图1-1显示了闭环运动控制系统的基础设施[5]。
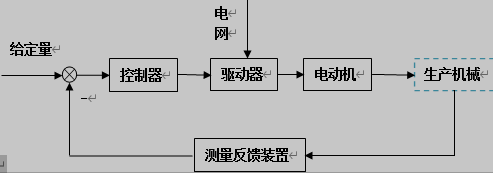
图1-1 闭环运动控制系统的基本结构
1.2 电机运动控制系统概述
电机运动控制技术是基于电动机作为控制对象的自动控制理论为指导,以电子技术和微机控制和计算机辅助设计为手段的基础上功率半导体器件的应用,并与检测技术和数据通信技术相结合,形成一个相对独立的科学和技术。其在图1-2中所示的结构元件[1]。
图1-2 电机运动控制构成要素结构图
如图1-2所示,电机的电机运动控制技术,电力电子技术,传感器技术,微电子技术,自动控制技术,多学科的应用技术。促进这些学科运动控制技术的发展。本文从电机技术,发展运动控制器的角度来看,分析运动控制技术的发展。
1.3 计算机控制技术的发展
从1955年至1962年早期的计算机使用真空管,体积庞大,价格昂贵,可靠性差,只能从事业务指导和设定控制[2]。到计算机的过程控制提出了许多特殊的要求,需要计算机命令快速响应各种进程,中断技术应运而生,使计算机能够使任务更加紧迫的反射过程。
从1962年至1967年监督运行由计算机控制,操作的一部分知道或设定值控制,我们仍然需要传统的模拟控制装置。 1962年英国的帝国化学工业公司利用计算机完全取代了原来的模拟控制。计算机控制的224个变量和129阀。由于计算机控制的过程变量,完全取代原有的模拟控制,这样的控制被称为直接数字控制,简称DDC。直接数字控制系统是一个计算机通过模拟输入通道和开关量输入通道的实时数据采集和控制律,根据一定的计算,最后发送控制信息,并通过模拟量输出通道和数字输出通道直接控制生产的过程[5]。 DDC系统的灵活性,允许计算机控制技术的发展已经进入了一个新的时代,但也为计算机控制技术为未来发展奠定了基础。 论文网
1972后,微型计算机的出现和发展,使计算机控制技术已经进入了一个新的阶段。采用微型计算机,制作了大量的分层梯控系统,分布式控制系统,专用控制器工业发展起到了巨大的推动作用。随后出现了集散控制系统(Distributed Control System,简称DCS),DCS采用分散控制、集中操作、分级管理、分级管理,自主设计的原则和总体协调,系统从顶部至底部到分散的过程控制水平,重点操作监控级,集成的信息化管理水平,形成了分层分布式控制。
-
MATLAB永磁同步电机矢量控制模型与算法设计
-
伺服电机双闭环控制系统的设计+程序
-
LabVIEW视频运动目标检测与跟踪方法研究
-
基于频率响应法的直流感...
-
交流异步电机直接转矩控制的matlab仿真研究
-
Pro/E风电机组无人机故障感知系统设计+源代码
-
AT89C51单片机直流电机转速...
河岸冲刷和泥沙淤积的监测国内外研究现状
杂拟谷盗体内共生菌沃尔...
java+mysql车辆管理系统的设计+源代码
大众媒体对公共政策制定的影响
乳业同业并购式全产业链...
当代大学生慈善意识研究+文献综述
十二层带中心支撑钢结构...
中考体育项目与体育教学合理结合的研究
酸性水汽提装置总汽提塔设计+CAD图纸
电站锅炉暖风器设计任务书