- 上一篇:线性时滞系统的多目标控制器设计与仿真
- 下一篇:Matlab立体仓库任务优化调度算法的研究
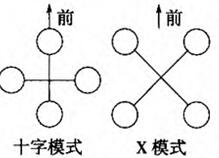
图2-1 四旋翼飞行器飞行模式
当飞行器中的螺旋桨高速转动时,根据牛顿第三定律,机体会受到反扭矩的作用,如果四个电机的转动方向相同,飞行器将原地自转。为了让转动时取得平衡,两条对角线上的两对推进器的转动方向相反,即前后一对顺时针转动,左右的一对逆时针转动。要实现图2-2(a) 描述了四旋翼飞行器的悬浮状态,所有的推进器都要达到同样的转动速度。随着转动速度的增加,当四个推进器所产生的升力等于或大于飞行器的重力时,四旋翼飞行器就能在空中稳定的悬浮或上升。为了能够如图2-2(b)那样地向前(向后)飞行,后面的推进器(前面的推进器)必须得转动得更快而与其相对的推进器必须转动得慢一点,这种情形我们称之为俯仰。同样的原理也适用于如图2-2(c)中的那样向右(向左)的运动,这种情形我们称之为翻滚。图2-2(d)描述了逆时针的偏航转动,前面和后面的推进器会转动得更快一点而左边和右边的推进器会转动得慢一点,这样飞行器上就有了扭矩从而开始自转。顺时针的偏航转动也是按照同样的原理进行的[22]。
-
四电极电导率传感器的设计
-
51单片机GSM的四旋翼飞行器远程监控设计+程序
-
PLC四层楼电梯控制系统设计+梯形图
-
四旋翼飞行器机载目标视...
-
高超声速飞行器纵向解耦...
-
PID四旋翼无人直升机的控制律设计
-
PLC基于WinCC的四层电梯监控系统设计+梯形图
酸性水汽提装置总汽提塔设计+CAD图纸
中考体育项目与体育教学合理结合的研究
电站锅炉暖风器设计任务书
河岸冲刷和泥沙淤积的监测国内外研究现状
杂拟谷盗体内共生菌沃尔...
大众媒体对公共政策制定的影响
十二层带中心支撑钢结构...
乳业同业并购式全产业链...
当代大学生慈善意识研究+文献综述
java+mysql车辆管理系统的设计+源代码