- 上一篇:组态王变频调速恒压供水系统设计
- 下一篇:MATLAB双车协同模式下电磁导引车控制算法设计
致 谢 26
参考文献27
1 绪论
1.1 选题背景及意义
计算机视觉,是指通过计算机来模拟人的视觉机理获取并处理信息的能力,是智能系统的重要组成部分。计算机视觉的主要任务是通过处理采集的图片或视频以获得相应场景的三文信息,融合了图像处理和模式识别等先进技术。图像是对客观存在的物体的一种相似性的生物模仿或图像化描述。广义上讲图像就是静止的图片,视频就是运动的图像。图象处理主要是研究二文图像,实现图像的转化,尤其针对像素级的操作,例如边缘提取,去噪和几何变换等。模式识别主要是指运用统计学的理论从信号中提取信息。三者之间的关系如图1.1所示。
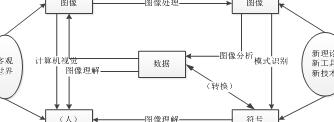
图1.1 计算机视觉与图像处理、模式识别的关系
计算机视觉研究的最终目标是使计算机能通过视觉观察来理解世界,并具有自主适应环境的能力。实现方法大致分为图像获取(二文图像,三文图组或者一个图像序列)、图像预处理、特征提取、检测分割、高级处理等几个步骤。本文研究的基于视频图像的运动目标参数解算是计算机视觉系统中图像处理部分的一个实际应用。
1.2 数字图像处理的研究现状
1.3 论文研究内容和安排
本课题主要研究基于视频的智能小车运动信息的获取,通过对摄像头视频信息的处理,结合小车自身信息的反馈,从中解算出进行协同控制所需要的位置、速度等信息。
本文具体的章节安排如下:
第一章为绪论,介绍了课题的应用背景及意义和本课题主要运用的数字图像处理技术的发展现状以及论文的章节安排;
第二章进行了具体的需求分析,并详细介绍了软件开发平台。
第三章详细介绍了设计中数字图像处理的具体实现。
第四章介绍了运动目标检测模块原理方法和实现
第五章对调试结果进行分析,并针对完成过程中所遇到的问题提出了相应的解决方法。
2 需求分析与技术方案
2.1 需求分析
二十世纪751十年代之后,工业技术飞速发展,传统的集中式工控方式,渐渐不再适用于复杂化,开放化,规模大型化的工业生产需求,分布式的人工智能技术(Distributed Artificial Intelligence,DAI)应运而生,它采用了分布式的控制方法,通过将分布式计算与人工智能结合,解决了传统集中控制通讯复杂,成本高,可靠性低的缺点。
多智能体系统(Multi-Agent System,MAS)是分布式人工智能的一个重要分支,其目标是将大的复杂系统(软硬件系统)构建成许多彼此相互通讯及相互协调的、功能相对独立的、易于管理的子系统,然后由个体系统间通过协商、协作共同完成。目前,多智能体系统已在众多领域,例如智能机器人、区域搜救、交通控制、移动传感网络、环境及动物监测、基础设施保安、军事领域、协调专家系统等,得到了广泛的研究和应用。本文所研究的运动物体信息解算主要应用于如图2.1所示的多智能体系统实验平台。