- 上一篇:城际快速列车电空制动控制系统的设计
- 下一篇:基于直方图均衡化方法水下图像增强技术研究
在利用机器人视觉来进行图像的检测与识别过程中,如果要确定三文空间里的某个物体的三文几何特征位置与其在数字图像里对应的点的关系,就一定要建立一个基于成像原理的几何模型,其中的参数就是相机的参数。通常情况下这些参数需要用实验以及分析计算才可以获得,求解相关的参数的过程便是相机标定。在机器视觉和图像的检测识别中,标定相机参数都是很重要的步骤,其结果的精度高低以及算法是否稳定会直接影响到图像检测目标识别的准确性。所以,良好的相机标定可以为进一步工作做基础,提升相机标定的精度是最近科研的重点。
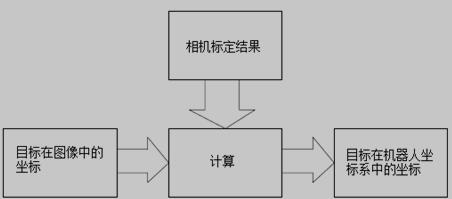
图2.1 相机标定过程
根据相机模型的不同,相机的参数也不同。相机成像模型一般有三种:针孔成像模型,正交投影模型,透视投影模型。针孔模型可以较好地解释成像过程,所以目前的标定算法主要应用该模型。针孔模型标定的研究关键主要是求解相机的内参数(Intrinsic Parameters)和外参数(Extrinsic Parameters)。本章第一节介绍了相机的针孔模型,第二节研究了一些常用的相机标定的方法,并实现了一种算法。
2.1 相机的针孔(Pinhole)模型
在针孔模型中,为了定量地描述物体在图像阵列中的像素位置和场景位置之间的关系,首先必须定义一系列坐标系
-
螺母内螺旋滚道非接触式自动检测技术研究
-
MSP430单片机自动搬运控制...
-
ARM自动售票机城市轨道交通中的AFC系统设计
-
STC89C53单片机银行自动取款机系统设计
-
PLC自动掰片系统的设计与应用
-
STC89C51单片机的自动窗帘控...
-
PLC物料输送分拣系统监控程序设计
中考体育项目与体育教学合理结合的研究
java+mysql车辆管理系统的设计+源代码
酸性水汽提装置总汽提塔设计+CAD图纸
杂拟谷盗体内共生菌沃尔...
乳业同业并购式全产业链...
大众媒体对公共政策制定的影响
电站锅炉暖风器设计任务书
十二层带中心支撑钢结构...
当代大学生慈善意识研究+文献综述
河岸冲刷和泥沙淤积的监测国内外研究现状