-
9
- 上一篇:PCA三维物体点云数据的自动分类与参数计算
- 下一篇:BCI脑电波分析的人脑思维状态的研究+Python程序
2.3.2 静态周期量化调度算法 13
2.4 本章小结 14
3 具有通信约束的NCS动态调度 15
3.1 引言 15
3.2 NCS的MEF-TOD动态调度算法 16
3.2.1 问题描述 16
3.2.2 MEF-TOD调度算法 18
3.3 本章小结 19
4 基于Truetime的NCS调度与量化控制仿真 20
4.1 引言 20
4.2 Truetime仿真工具箱简介 20
4.3 静态量化算法的仿真设计与结果 21
4.3.1 仿真结构图与仿真算例 21
4.3.2 仿真结果图 22
4.3.3 结果的分析 22
4.4 MEF-TOD调度方法的仿真与分析 23
4.5 本章小结 25
结 论 26
致 谢 27
参考文献 28
1 绪论
1.1 NCS的概述
网络控制系统(Networked Control Systems)[ ] [ ][ ]叫又称网络化的控制系统,若某反馈控制系统其中的控制环可以通过一个实时网络进行关闭则称之为网络控制系统。它的定义是被著名研究学者——马里兰大学G.C.Walsh在他的著作中提出。网络控制系统的主要是由这些部分组成:传感器、控制器、执行器以及一个共享网络,这个共享网络是所有部件传输数据时都会使用的,以及被控对象。他们之间互相协作,从而使有限的网络资源充分被利用,并且在带宽不是无限的情况下使得各个设备之间能够协调操作。网络控制系统设计很多领域,尤其是计算机技术和通信技术,以及控制技术,都会由很多的相关信息。作为一种交叉学科,它还有集成化,节点智能化等特点,是一种实时反馈控制系统。
在传统的网络系统中,设备之间都是直接相连的,这样就不会产生时延,并且传播过程也是无损耗的。但是,与传统的相比,网络控制系统优点很多,安装简单、便于布线、信息资源共享方便等[ ][ ]。
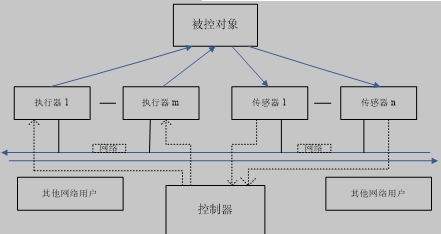
图 1 1 网络控制系统
这些年来,由于控制技术的快速发展,以及通信行业的崛起等,该新兴的网络控制行业不断地壮大,越来越多的实现非常困难的工业操作需要用到网络控制系统。例如汽车工业制造、飞行器设计[ ]、机器人控制[ ][ ][ ][ ]以及基于Internet的远程过程控制实验[ ][ ]等。一个典型的网络控制系统结构如图1-1所示[ ]。